 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Certifiable Algorithm for Simultaneous Shape Estimation and Object Tracking
Jun 24, 2024Applications from manipulation to autonomous vehicles rely on robust and general object tracking to safely perform tasks in dynamic environments. We propose the first certifiably optimal category-level approach for simultaneous shape estimation and pose tracking of an object of known category (e.g. a car). Our approach uses 3D semantic keypoint measurements extracted from an RGB-D image sequence, and phrases the estimation as a fixed-lag smoothing problem. Temporal constraints enforce the object's rigidity (fixed shape) and smooth motion according to a constant-twist motion model. The solutions to this problem are the estimates of the object's state (poses, velocities) and shape (paramaterized according to the active shape model) over the smoothing horizon. Our key contribution is to show that despite the non-convexity of the fixed-lag smoothing problem, we can solve it to certifiable optimality using a small-size semidefinite relaxation. We also present a fast outlier rejection scheme that filters out incorrect keypoint detections with shape and time compatibility tests, and wrap our certifiable solver in a graduated non-convexity scheme. We evaluate the proposed approach on synthetic and real data, showcasing its performance in a table-top manipulation scenario and a drone-based vehicle tracking application.
Aggressive Aerial Grasping using a Soft Drone with Onboard Perception
Aug 11, 2023Contrary to the stunning feats observed in birds of prey, aerial manipulation and grasping with flying robots still lack versatility and agility. Conventional approaches using rigid manipulators require precise positioning and are subject to large reaction forces at grasp, which limit performance at high speeds. The few reported examples of aggressive aerial grasping rely on motion capture systems, or fail to generalize across environments and grasp targets. We describe the first example of a soft aerial manipulator equipped with a fully onboard perception pipeline, capable of robustly localizing and grasping visually and morphologically varied objects. The proposed system features a novel passively closing tendon-actuated soft gripper that enables fast closure at grasp, while compensating for position errors, complying to the target-object morphology, and dampening reaction forces. The system includes an onboard perception pipeline that combines a neural-network-based semantic keypoint detector with a state-of-the-art robust 3D object pose estimator, whose estimate is further refined using a fixed-lag smoother. The resulting pose estimate is passed to a minimum-snap trajectory planner, tracked by an adaptive controller that fully compensates for the added mass of the grasped object. Finally, a finite-element-based controller determines optimal gripper configurations for grasping. Rigorous experiments confirm that our approach enables dynamic, aggressive, and versatile grasping. We demonstrate fully onboard vision-based grasps of a variety of objects, in both indoor and outdoor environments, and up to speeds of 2.0 m/s -- the fastest vision-based grasp reported in the literature. Finally, we take a major step in expanding the utility of our platform beyond stationary targets, by demonstrating motion-capture-based grasps of targets moving up to 0.3 m/s, with relative speeds up to 1.5 m/s.
Dynamic Grasping with a "Soft" Drone: From Theory to Practice
Mar 11, 2021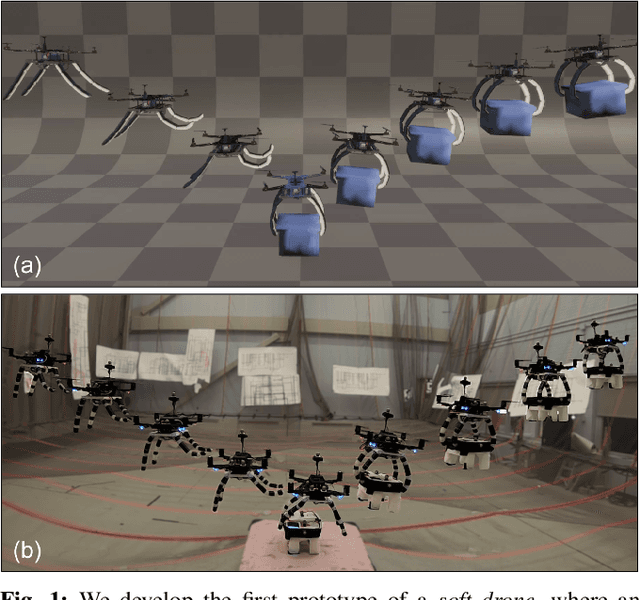
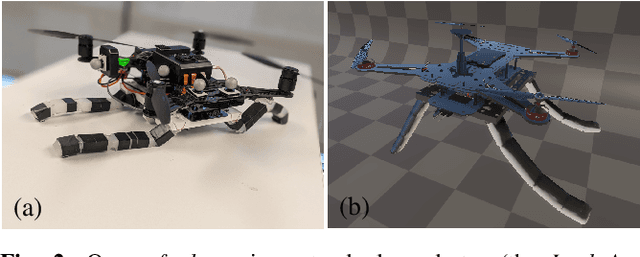
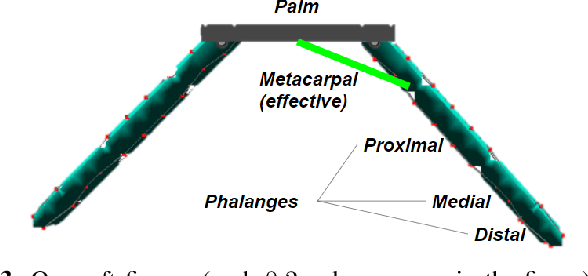
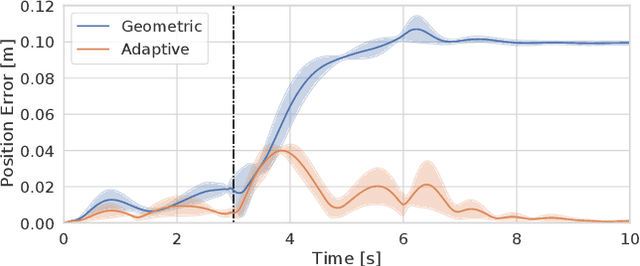
Rigid grippers used in existing aerial manipulators require precise positioning to achieve successful grasps and transmit large contact forces that may destabilize the drone. This limits the speed during grasping and prevents "dynamic grasping", where the drone attempts to grasp an object while moving. On the other hand, biological systems (e.g., birds) rely on compliant and soft parts to dampen contact forces and compensate for grasping inaccuracy, enabling impressive feats. This paper presents the first prototype of a soft drone -- a quadrotor where traditional (i.e., rigid) landing gears are replaced with a soft tendon-actuated gripper to enable aggressive grasping. We provide three key contributions. First, we describe our soft drone prototype, including electro-mechanical design, software infrastructure, and fabrication. Second, we review the set of algorithms we use for trajectory optimization and control of the drone and the soft gripper; the algorithms combine state-of-the-art techniques for quadrotor control (i.e., an adaptive geometric controller) with advanced soft robotics models (i.e., a quasi-static finite element model). Finally, we evaluate our soft drone in physics simulations (using SOFA and Unity) and in real tests in a motion-capture room. Our drone is able to dynamically grasp objects of unknown shape where baseline approaches fail. Our physical prototype ensures consistent performance, achieving 91.7% successful grasps across 23 trials. We showcase dynamic grasping results in the video attachment.