 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Grasping with a "Soft" Drone: From Theory to Practice
Mar 11, 2021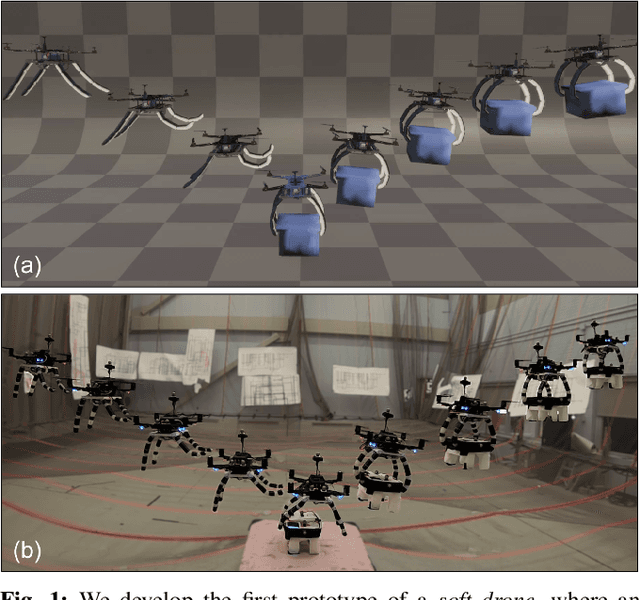
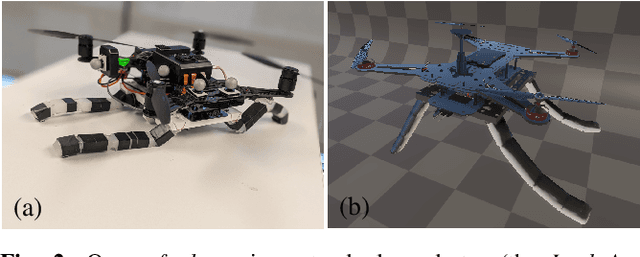
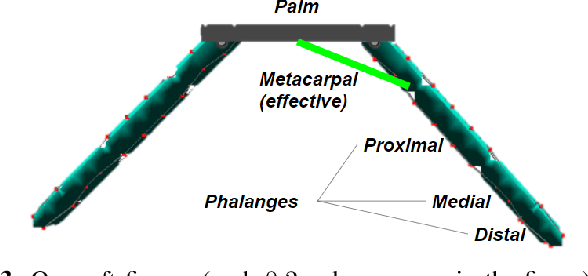
Rigid grippers used in existing aerial manipulators require precise positioning to achieve successful grasps and transmit large contact forces that may destabilize the drone. This limits the speed during grasping and prevents "dynamic grasping", where the drone attempts to grasp an object while moving. On the other hand, biological systems (e.g., birds) rely on compliant and soft parts to dampen contact forces and compensate for grasping inaccuracy, enabling impressive feats. This paper presents the first prototype of a soft drone -- a quadrotor where traditional (i.e., rigid) landing gears are replaced with a soft tendon-actuated gripper to enable aggressive grasping. We provide three key contributions. First, we describe our soft drone prototype, including electro-mechanical design, software infrastructure, and fabrication. Second, we review the set of algorithms we use for trajectory optimization and control of the drone and the soft gripper; the algorithms combine state-of-the-art techniques for quadrotor control (i.e., an adaptive geometric controller) with advanced soft robotics models (i.e., a quasi-static finite element model). Finally, we evaluate our soft drone in physics simulations (using SOFA and Unity) and in real tests in a motion-capture room. Our drone is able to dynamically grasp objects of unknown shape where baseline approaches fail. Our physical prototype ensures consistent performance, achieving 91.7% successful grasps across 23 trials. We showcase dynamic grasping results in the video attachment.
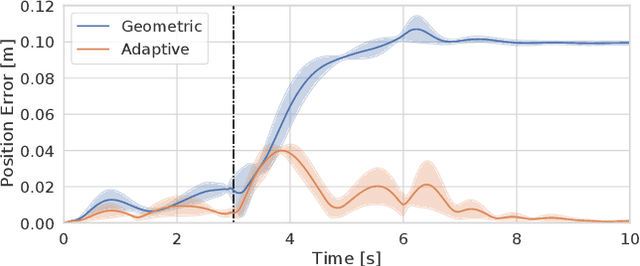
Control and Trajectory Optimization for Soft Aerial Manipulation
Apr 08, 2020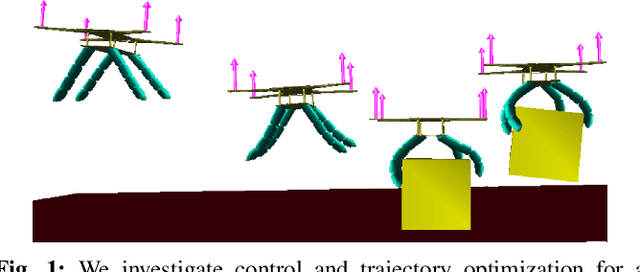
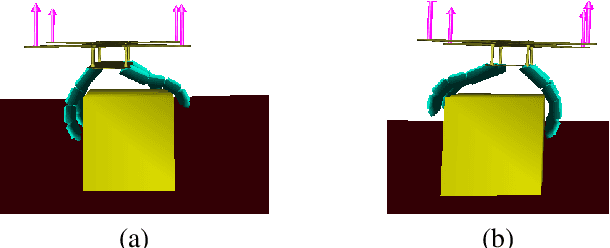
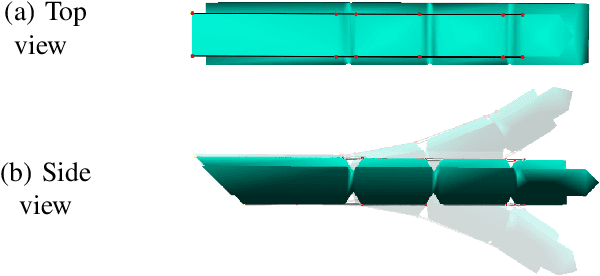
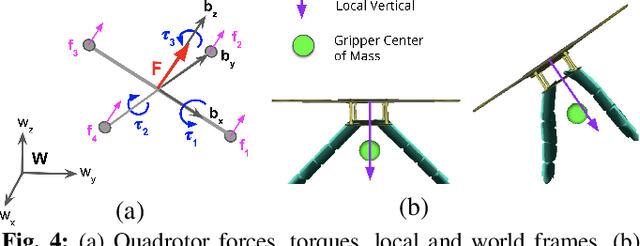
Manipulation and grasping with unmanned aerial vehicles (UAVs) currently require accurate positioning and are often executed at reduced speed to ensure successful grasps. This is due to the fact that typical UAVs can only accommodate rigid manipulators with few degrees of freedom, which limits their capability to compensate for disturbances caused by the vehicle positioning errors. Moreover, they have to minimize external contact forces in order to maintain stability. Biological systems, on the other hand, exploit softness to overcome similar limitations, and fully exploit compliance to enable aggressive grasping. This paper investigates control and trajectory optimization for a soft aerial manipulator, consisting of a quadrotor and a tendon-actuated soft gripper, in which the advantages of softness can be fully exploited. To the best of our knowledge, this is the first work at the intersection between soft manipulation and UAV control. We present a decoupled approach for the quadrotor and the soft gripper, combining (i) a geometric controller and a minimum-snap trajectory optimization for the quadrotor (rigid) base, with (ii) a quasi-static finite element model and control-space interpolation for the soft gripper. We prove that the geometric controller asymptotically stabilizes the quadrotor velocity and attitude despite the addition of the soft load. Finally, we evaluate the proposed system in a realistic soft dynamics simulator, and show that: (i) the geometric controller is fairly insensitive to the soft payload, (ii) the platform can reliably grasp unknown objects despite inaccurate positioning and initial conditions, and (iii) the decoupled controller is amenable for real-time execution.