 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Refocus with Video Diffusion Models
Dec 24, 2025



Focus is a cornerstone of photography, yet autofocus systems often fail to capture the intended subject, and users frequently wish to adjust focus after capture. We introduce a novel method for realistic post-capture refocusing using video diffusion models. From a single defocused image, our approach generates a perceptually accurate focal stack, represented as a video sequence, enabling interactive refocusing and unlocking a range of downstream applications. We release a large-scale focal stack dataset acquired under diverse real-world smartphone conditions to support this work and future research. Our method consistently outperforms existing approaches in both perceptual quality and robustness across challenging scenarios, paving the way for more advanced focus-editing capabilities in everyday photography. Code and data are available at https://learn2refocus.github.io
Generating the Past, Present and Future from a Motion-Blurred Image
Dec 22, 2025We seek to answer the question: what can a motion-blurred image reveal about a scene's past, present, and future? Although motion blur obscures image details and degrades visual quality, it also encodes information about scene and camera motion during an exposure. Previous techniques leverage this information to estimate a sharp image from an input blurry one, or to predict a sequence of video frames showing what might have occurred at the moment of image capture. However, they rely on handcrafted priors or network architectures to resolve ambiguities in this inverse problem, and do not incorporate image and video priors on large-scale datasets. As such, existing methods struggle to reproduce complex scene dynamics and do not attempt to recover what occurred before or after an image was taken. Here, we introduce a new technique that repurposes a pre-trained video diffusion model trained on internet-scale datasets to recover videos revealing complex scene dynamics during the moment of capture and what might have occurred immediately into the past or future. Our approach is robust and versatile; it outperforms previous methods for this task, generalizes to challenging in-the-wild images, and supports downstream tasks such as recovering camera trajectories, object motion, and dynamic 3D scene structure. Code and data are available at https://blur2vid.github.io
* Code and data are available at https://blur2vid.github.io
Examining Joint Demosaicing and Denoising for Single-, Quad-, and Nona-Bayer Patterns
Apr 08, 2025Camera sensors have color filters arranged in a mosaic layout, traditionally following the Bayer pattern. Demosaicing is a critical step camera hardware applies to obtain a full-channel RGB image. Many smartphones now have multiple sensors with different patterns, such as Quad-Bayer or Nona-Bayer. Most modern deep network-based models perform joint demosaicing and denoising with the current strategy of training a separate network per pattern. Relying on individual models per pattern requires additional memory overhead and makes it challenging to switch quickly between cameras. In this work, we are interested in analyzing strategies for joint demosaicing and denoising for the three main mosaic layouts (1x1 Single-Bayer, 2x2 Quad-Bayer, and 3x3 Nona-Bayer). We found that concatenating a three-channel mosaic embedding to the input image and training with a unified demosaicing architecture yields results that outperform existing Quad-Bayer and Nona-Bayer models and are comparable to Single-Bayer models. Additionally, we describe a maskout strategy that enhances the model performance and facilitates dead pixel correction -- a step often overlooked by existing AI-based demosaicing models. As part of this effort, we captured a new demosaicing dataset of 638 RAW images that contain challenging scenes with patches annotated for training, validation, and testing.
Multispectral Demosaicing via Dual Cameras
Mar 27, 2025Multispectral (MS) images capture detailed scene information across a wide range of spectral bands, making them invaluable for applications requiring rich spectral data. Integrating MS imaging into multi camera devices, such as smartphones, has the potential to enhance both spectral applications and RGB image quality. A critical step in processing MS data is demosaicing, which reconstructs color information from the mosaic MS images captured by the camera. This paper proposes a method for MS image demosaicing specifically designed for dual-camera setups where both RGB and MS cameras capture the same scene. Our approach leverages co-captured RGB images, which typically have higher spatial fidelity, to guide the demosaicing of lower-fidelity MS images. We introduce the Dual-camera RGB-MS Dataset - a large collection of paired RGB and MS mosaiced images with ground-truth demosaiced outputs - that enables training and evaluation of our method. Experimental results demonstrate that our method achieves state-of-the-art accuracy compared to existing techniques.
Gain-MLP: Improving HDR Gain Map Encoding via a Lightweight MLP
Mar 14, 2025


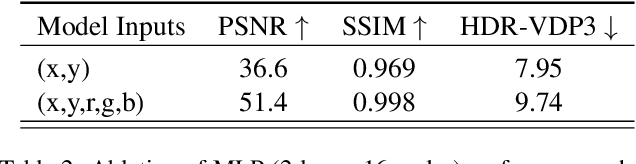
While most images shared on the web and social media platforms are encoded in standard dynamic range (SDR), many displays now can accommodate high dynamic range (HDR) content. Additionally, modern cameras can capture images in an HDR format but convert them to SDR to ensure maximum compatibility with existing workflows and legacy displays. To support both SDR and HDR, new encoding formats are emerging that store additional metadata in SDR images in the form of a gain map. When applied to the SDR image, the gain map recovers the HDR version of the image as needed. These gain maps, however, are typically down-sampled and encoded using standard image compression, such as JPEG and HEIC, which can result in unwanted artifacts. In this paper, we propose to use a lightweight multi-layer perceptron (MLP) network to encode the gain map. The MLP is optimized using the SDR image information as input and provides superior performance in terms of HDR reconstruction. Moreover, the MLP-based approach uses a fixed memory footprint (10 KB) and requires no additional adjustments to accommodate different image sizes or encoding parameters. We conduct extensive experiments on various MLP based HDR embedding strategies and demonstrate that our approach outperforms the current state-of-the-art.
Examining Autoexposure for Challenging Scenes
Sep 08, 2023Autoexposure (AE) is a critical step applied by camera systems to ensure properly exposed images. While current AE algorithms are effective in well-lit environments with constant illumination, these algorithms still struggle in environments with bright light sources or scenes with abrupt changes in lighting. A significant hurdle in developing new AE algorithms for challenging environments, especially those with time-varying lighting, is the lack of suitable image datasets. To address this issue, we have captured a new 4D exposure dataset that provides a large solution space (i.e., shutter speed range from (1/500 to 15 seconds) over a temporal sequence with moving objects, bright lights, and varying lighting. In addition, we have designed a software platform to allow AE algorithms to be used in a plug-and-play manner with the dataset. Our dataset and associate platform enable repeatable evaluation of different AE algorithms and provide a much-needed starting point to develop better AE methods. We examine several existing AE strategies using our dataset and show that most users prefer a simple saliency method for challenging lighting conditions.