 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Stage Structured Estimators for Information Freshness
Jan 26, 2026Most of the contemporary literature on information freshness solely focuses on the analysis of freshness for martingale estimators, which simply use the most recently received update as the current estimate. While martingale estimators are easier to analyze, they are far from optimal, especially in pull-based update systems, where maximum aposteriori probability (MAP) estimators are known to be optimal, but are analytically challenging. In this work, we introduce a new class of estimators called $p$-MAP estimators, which enable us to model the MAP estimator as a piecewise constant function with finitely many stages, bringing us closer to a full characterization of the MAP estimators when modeling information freshness.
Structured Estimators: A New Perspective on Information Freshness
May 05, 2025



In recent literature, when modeling for information freshness in remote estimation settings, estimators have been mainly restricted to the class of martingale estimators, meaning the remote estimate at any time is equal to the most recently received update. This is mainly due to its simplicity and ease of analysis. However, these martingale estimators are far from optimal in some cases, especially in pull-based update systems. For such systems, maximum aposteriori probability (MAP) estimators are optimum, but can be challenging to analyze. Here, we introduce a new class of estimators, called structured estimators, which retain useful characteristics from a MAP estimate while still being analytically tractable. Our proposed estimators move seamlessly from a martingale estimator to a MAP estimator.
Timely Tracking of a Wiener Process With Single Bit Quantization
May 02, 2025We consider the problem of timely tracking of a Wiener process via an energy-conserving sensor by utilizing a single bit quantization strategy under periodic sampling. Contrary to conventional single bit quantizers which only utilize the transmitted bit to convey information, in our codebook, we use an additional `$\emptyset$' symbol to encode the event of \emph{not transmitting}. Thus, our quantization functions are composed of three decision regions as opposed to the conventional two regions. First, we propose an optimum quantization method in which the optimum quantization functions are obtained by tracking the distributions of the quantization error. However, this method requires a high computational cost and might not be applicable for energy-conserving sensors. Thus, we propose two additional low complexity methods. In the last-bit aware method, three predefined quantization functions are available to both devices, and they switch the quantization function based on the last transmitted bit. With the Gaussian approximation method, we calculate a single quantization function by assuming that the quantization error can be approximated as Gaussian. While previous methods require a constant delay assumption, this method also works for random delay. We observe that all three methods perform similarly in terms of mean-squared error and transmission cost.
Source Coding for a Wiener Process
Apr 02, 2025



We develop a novel source coding strategy for sampling and monitoring of a Wiener process. For the encoding process, we employ a four level ``quantization'' scheme, which employs monotone function thresholds as opposed to fixed constant thresholds. Leveraging the hitting times of the Wiener process with these thresholds, we devise a sampling and encoding strategy which does not incur any quantization errors. We give analytical expressions for the mean squared error (MSE) and find the optimal source code lengths to minimize the MSE under this monotone function threshold scheme, subject to a sampling rate constraint.
CAFe: Cost and Age aware Federated Learning
May 24, 2024



In many federated learning (FL) models, a common strategy employed to ensure the progress in the training process, is to wait for at least $M$ clients out of the total $N$ clients to send back their local gradients based on a reporting deadline $T$, once the parameter server (PS) has broadcasted the global model. If enough clients do not report back within the deadline, the particular round is considered to be a failed round and the training round is restarted from scratch. If enough clients have responded back, the round is deemed successful and the local gradients of all the clients that responded back are used to update the global model. In either case, the clients that failed to report back an update within the deadline would have wasted their computational resources. Having a tighter deadline (small $T$) and waiting for a larger number of participating clients (large $M$) leads to a large number of failed rounds and therefore greater communication cost and computation resource wastage. However, having a larger $T$ leads to longer round durations whereas smaller $M$ may lead to noisy gradients. Therefore, there is a need to optimize the parameters $M$ and $T$ such that communication cost and the resource wastage is minimized while having an acceptable convergence rate. In this regard, we show that the average age of a client at the PS appears explicitly in the theoretical convergence bound, and therefore, can be used as a metric to quantify the convergence of the global model. We provide an analytical scheme to select the parameters $M$ and $T$ in this setting.
The Role of Early Sampling in Age of Information Minimization in the Presence of ACK Delays
Aug 15, 2023



We study the structure of the optimal sampling policy to minimize the average age of information when the channel state (i.e., busy or idle) is not immediately perceived by the transmitter upon the delivery of a sample due to random delays in the feedback (ACK) channel. In this setting, we show that it is not always optimal to wait for ACKs before sampling, and thus, early sampling before the arrival of an ACK may be optimal. We show that, under certain conditions on the distribution of the ACK delays, the optimal policy is a mixture of two threshold policies.
Extending Multi-Object Tracking systems to better exploit appearance and 3D information
Dec 25, 2019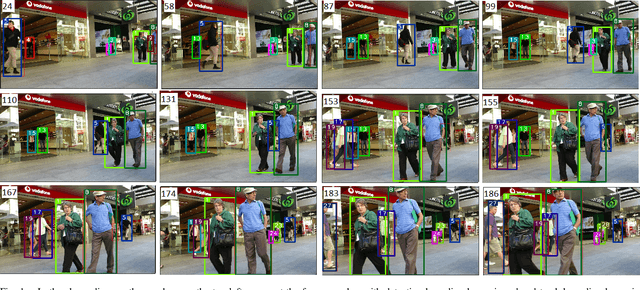
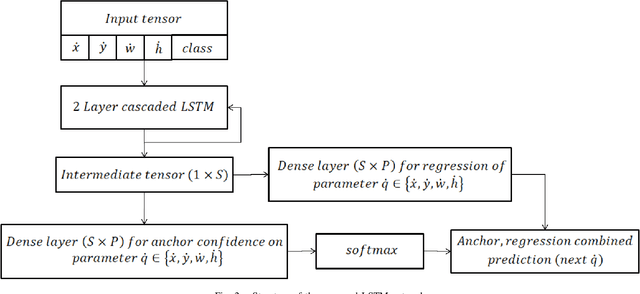
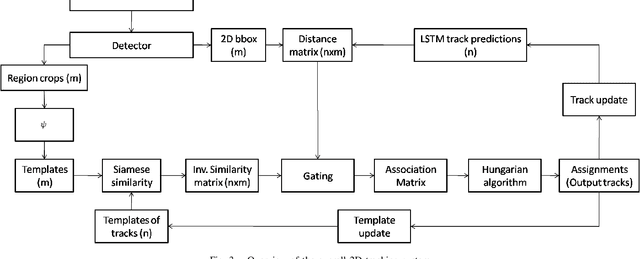
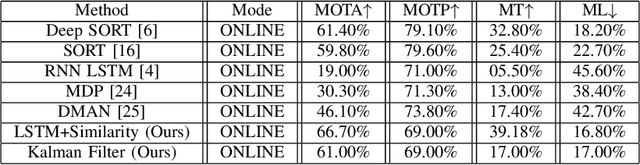
Tracking multiple objects in real time is essential for a variety of real-world applications, with self-driving industry being at the foremost. This work involves exploiting temporally varying appearance and motion information for tracking. Siamese networks have recently become highly successful at appearance based single object tracking and Recurrent Neural Networks have started dominating both motion and appearance based tracking. Our work focuses on combining Siamese networks and RNNs to exploit appearance and motion information respectively to build a joint system capable of real time multi-object tracking. We further explore heuristics based constraints for tracking in the Birds Eye View Space for efficiently exploiting 3D information as a constrained optimization problem for track prediction.
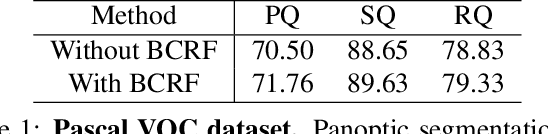
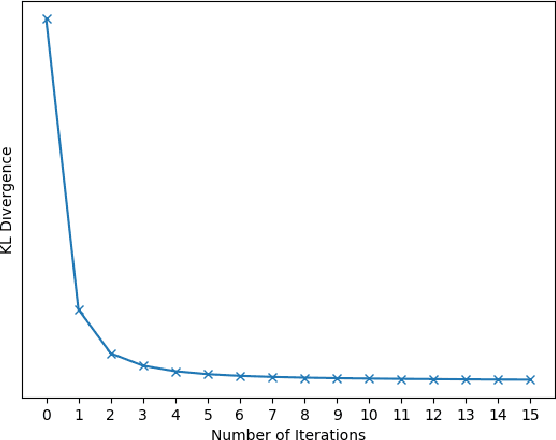
Bipartite Conditional Random Fields for Panoptic Segmentation
Dec 11, 2019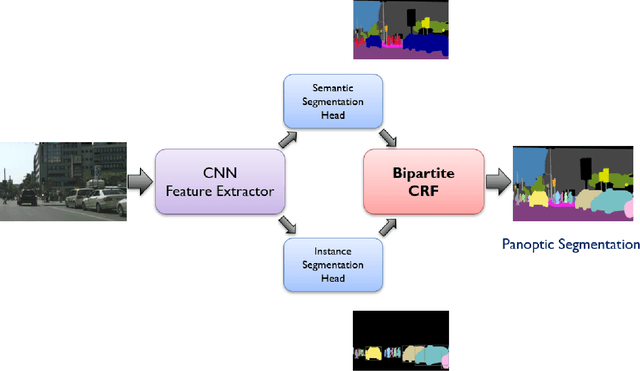

We tackle the panoptic segmentation problem with a conditional random field (CRF) model. Panoptic segmentation involves assigning a semantic label and an instance label to each pixel of a given image. At each pixel, the semantic label and the instance label should be compatible. Furthermore, a good panoptic segmentation should have a number of other desirable properties such as the spatial and color consistency of the labeling (similar looking neighboring pixels should have the same semantic label and the instance label). To tackle this problem, we propose a CRF model, named Bipartite CRF or BCRF, with two types of random variables for semantic and instance labels. In this formulation, various energies are defined within and across the two types of random variables to encourage a consistent panoptic segmentation. We propose a mean-field-based efficient inference algorithm for solving the CRF and empirically show its convergence properties. This algorithm is fully differentiable, and therefore, BCRF inference can be included as a trainable module in a deep network. In the experimental evaluation, we quantitatively and qualitatively show that the BCRF yields superior panoptic segmentation results in practice.