 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe and Transparent Robots for Human-in-the-Loop Meat Processing
Aug 20, 2025Labor shortages have severely affected the meat processing sector. Automated technology has the potential to support the meat industry, assist workers, and enhance job quality. However, existing automation in meat processing is highly specialized, inflexible, and cost intensive. Instead of forcing manufacturers to buy a separate device for each step of the process, our objective is to develop general-purpose robotic systems that work alongside humans to perform multiple meat processing tasks. Through a recently conducted survey of industry experts, we identified two main challenges associated with integrating these collaborative robots alongside human workers. First, there must be measures to ensure the safety of human coworkers; second, the coworkers need to understand what the robot is doing. This paper addresses both challenges by introducing a safety and transparency framework for general-purpose meat processing robots. For safety, we implement a hand-detection system that continuously monitors nearby humans. This system can halt the robot in situations where the human comes into close proximity of the operating robot. We also develop an instrumented knife equipped with a force sensor that can differentiate contact between objects such as meat, bone, or fixtures. For transparency, we introduce a method that detects the robot's uncertainty about its performance and uses an LED interface to communicate that uncertainty to the human. Additionally, we design a graphical interface that displays the robot's plans and allows the human to provide feedback on the planned cut. Overall, our framework can ensure safe operation while keeping human workers in-the-loop about the robot's actions which we validate through a user study.
Safely and Autonomously Cutting Meat with a Collaborative Robot Arm
Jan 15, 2024Labor shortages in the United States are impacting a number of industries including the meat processing sector. Collaborative technologies that work alongside humans while increasing production abilities may support the industry by enhancing automation and improving job quality. However, existing automation technologies used in the meat industry have limited collaboration potential, low flexibility, and high cost. The objective of this work was to explore the use of a robot arm to collaboratively work alongside a human and complete tasks performed in a meat processing facility. Toward this objective, we demonstrated proof-of-concept approaches to ensure human safety while exploring the capacity of the robot arm to perform example meat processing tasks. In support of human safety, we developed a knife instrumentation system to detect when the cutting implement comes into contact with meat within the collaborative space. To demonstrate the capability of the system to flexibly conduct a variety of basic meat processing tasks, we developed vision and control protocols to execute slicing, trimming, and cubing of pork loins. We also collected a subjective evaluation of the actions from experts within the U.S. meat processing industry. On average the experts rated the robot's performance as adequate. Moreover, the experts generally preferred the cuts performed in collaboration with a human worker to cuts completed autonomously, highlighting the benefits of robotic technologies that assist human workers rather than replace them. Video demonstrations of our proposed framework can be found here: https://youtu.be/56mdHjjYMVc
Graph Node Embeddings using Domain-Aware Biased Random Walks
Aug 08, 2019
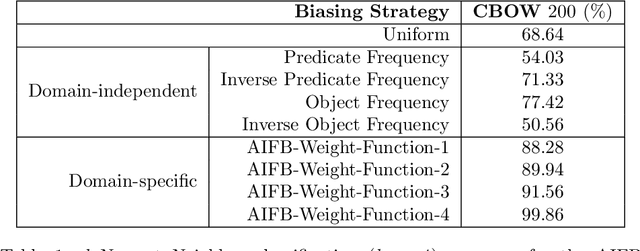
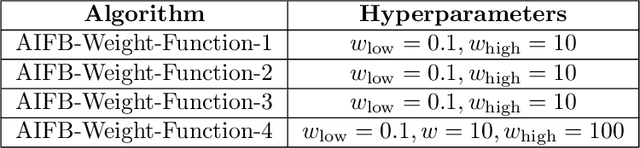

The recent proliferation of publicly available graph-structured data has sparked an interest in machine learning algorithms for graph data. Since most traditional machine learning algorithms assume data to be tabular, embedding algorithms for mapping graph data to real-valued vector spaces has become an active area of research. Existing graph embedding approaches are based purely on structural information and ignore any semantic information from the underlying domain. In this paper, we demonstrate that semantic information can play a useful role in computing graph embeddings. Specifically, we present a framework for devising embedding strategies aware of domain-specific interpretations of graph nodes and edges, and use knowledge of downstream machine learning tasks to identify relevant graph substructures. Using two real-life domains, we show that our framework yields embeddings that are simple to implement and yet achieve equal or greater accuracy in machine learning tasks compared to domain independent approaches.