 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUtilizing Satellite Imagery Datasets and Machine Learning Data Models to Evaluate Infrastructure Change in Undeveloped Regions
Sep 01, 2020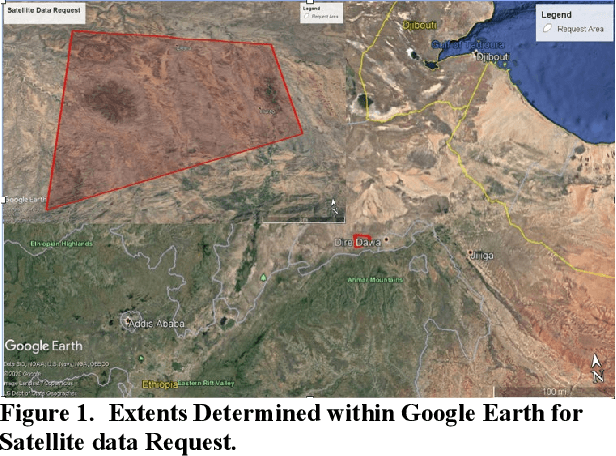


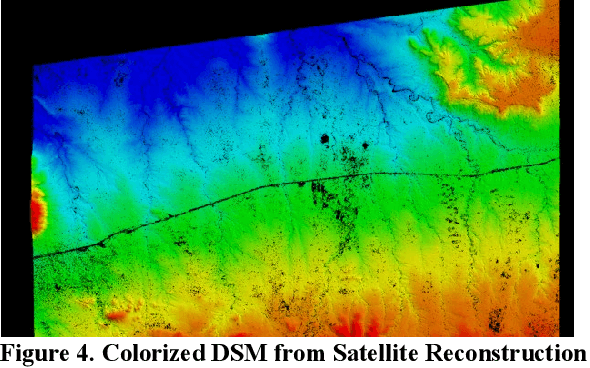
In the globalized economic world, it has become important to understand the purpose behind infrastructural and construction initiatives occurring within developing regions of the earth. This is critical when the financing for such projects must be coming from external sources, as is occurring throughout major portions of the African continent. When it comes to imagery analysis to research these regions, ground and aerial coverage is either non-existent or not commonly acquired. However, imagery from a large number of commercial, private, and government satellites have produced enormous datasets with global coverage, compiling geospatial resources that can be mined and processed using machine learning algorithms and neural networks. The downside is that a majority of these geospatial data resources are in a state of technical stasis, as it is difficult to quickly parse and determine a plan for request and processing when acquiring satellite image data. A goal of this research is to allow automated monitoring for largescale infrastructure projects, such as railways, to determine reliable metrics that define and predict the direction construction initiatives could take, allowing for a directed monitoring via narrowed and targeted satellite imagery requests. By utilizing photogrammetric techniques on available satellite data to create 3D Meshes and Digital Surface Models (DSM) we hope to effectively predict transport routes. In understanding the potential directions that largescale transport infrastructure will take through predictive modeling, it becomes much easier to track, understand, and monitor progress, especially in areas with limited imagery coverage.
Semantic Segmentation and Data Fusion of Microsoft Bing 3D Cities and Small UAV-based Photogrammetric Data
Aug 21, 2020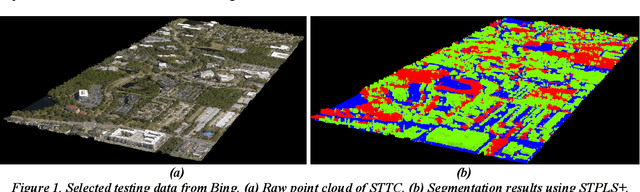
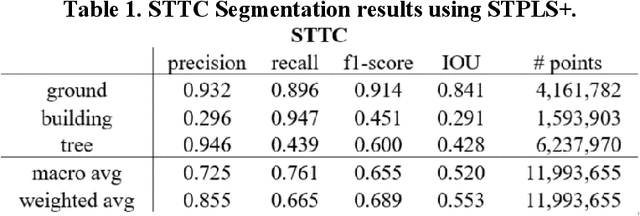
With state-of-the-art sensing and photogrammetric techniques, Microsoft Bing Maps team has created over 125 highly detailed 3D cities from 11 different countries that cover hundreds of thousands of square kilometer areas. The 3D city models were created using the photogrammetric technique with high-resolution images that were captured from aircraft-mounted cameras. Such a large 3D city database has caught the attention of the US Army for creating virtual simulation environments to support military operations. However, the 3D city models do not have semantic information such as buildings, vegetation, and ground and cannot allow sophisticated user-level and system-level interaction. At I/ITSEC 2019, the authors presented a fully automated data segmentation and object information extraction framework for creating simulation terrain using UAV-based photogrammetric data. This paper discusses the next steps in extending our designed data segmentation framework for segmenting 3D city data. In this study, the authors first investigated the strengths and limitations of the existing framework when applied to the Bing data. The main differences between UAV-based and aircraft-based photogrammetric data are highlighted. The data quality issues in the aircraft-based photogrammetric data, which can negatively affect the segmentation performance, are identified. Based on the findings, a workflow was designed specifically for segmenting Bing data while considering its characteristics. In addition, since the ultimate goal is to combine the use of both small unmanned aerial vehicle (UAV) collected data and the Bing data in a virtual simulation environment, data from these two sources needed to be aligned and registered together. To this end, the authors also proposed a data registration workflow that utilized the traditional iterative closest point (ICP) with the extracted semantic information.
Generating synthetic photogrammetric data for training deep learning based 3D point cloud segmentation models
Aug 21, 2020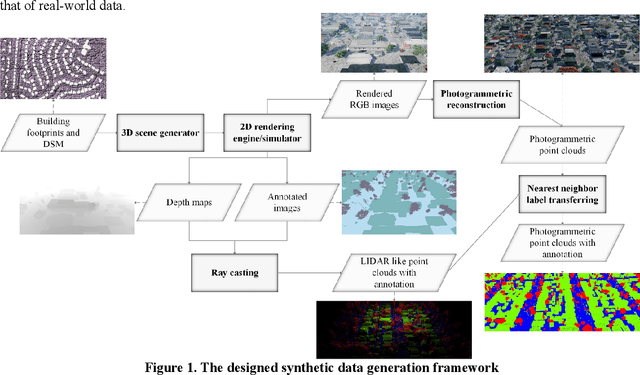
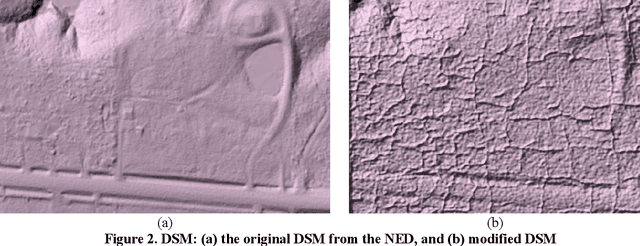
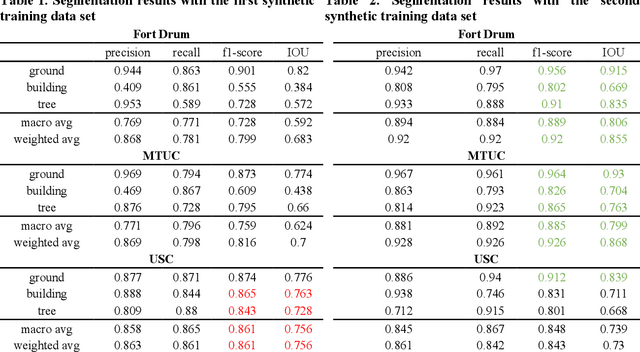
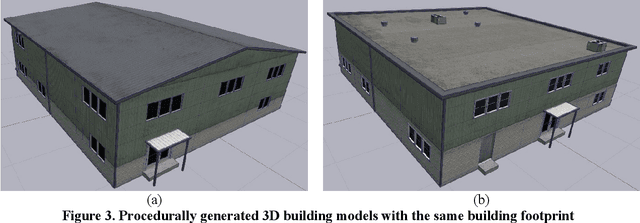
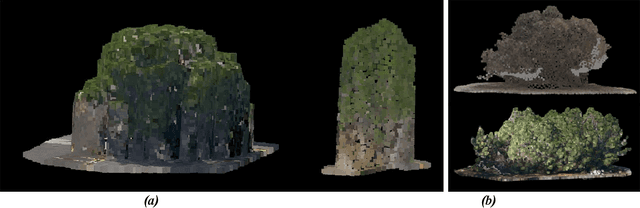
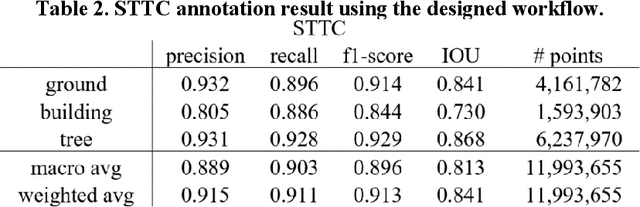
At I/ITSEC 2019, the authors presented a fully-automated workflow to segment 3D photogrammetric point-clouds/meshes and extract object information, including individual tree locations and ground materials (Chen et al., 2019). The ultimate goal is to create realistic virtual environments and provide the necessary information for simulation. We tested the generalizability of the previously proposed framework using a database created under the U.S. Army's One World Terrain (OWT) project with a variety of landscapes (i.e., various buildings styles, types of vegetation, and urban density) and different data qualities (i.e., flight altitudes and overlap between images). Although the database is considerably larger than existing databases, it remains unknown whether deep-learning algorithms have truly achieved their full potential in terms of accuracy, as sizable data sets for training and validation are currently lacking. Obtaining large annotated 3D point-cloud databases is time-consuming and labor-intensive, not only from a data annotation perspective in which the data must be manually labeled by well-trained personnel, but also from a raw data collection and processing perspective. Furthermore, it is generally difficult for segmentation models to differentiate objects, such as buildings and tree masses, and these types of scenarios do not always exist in the collected data set. Thus, the objective of this study is to investigate using synthetic photogrammetric data to substitute real-world data in training deep-learning algorithms. We have investigated methods for generating synthetic UAV-based photogrammetric data to provide a sufficiently sized database for training a deep-learning algorithm with the ability to enlarge the data size for scenarios in which deep-learning models have difficulties.
Fully Automated Photogrammetric Data Segmentation and Object Information Extraction Approach for Creating Simulation Terrain
Aug 09, 2020Our previous works have demonstrated that visually realistic 3D meshes can be automatically reconstructed with low-cost, off-the-shelf unmanned aerial systems (UAS) equipped with capable cameras, and efficient photogrammetric software techniques. However, such generated data do not contain semantic information/features of objects (i.e., man-made objects, vegetation, ground, object materials, etc.) and cannot allow the sophisticated user-level and system-level interaction. Considering the use case of the data in creating realistic virtual environments for training and simulations (i.e., mission planning, rehearsal, threat detection, etc.), segmenting the data and extracting object information are essential tasks. Thus, the objective of this research is to design and develop a fully automated photogrammetric data segmentation and object information extraction framework. To validate the proposed framework, the segmented data and extracted features were used to create virtual environments in the authors previously designed simulation tool i.e., Aerial Terrain Line of Sight Analysis System (ATLAS). The results showed that 3D mesh trees could be replaced with geo-typical 3D tree models using the extracted individual tree locations. The extracted tree features (i.e., color, width, height) are valuable for selecting the appropriate tree species and enhance visual quality. Furthermore, the identified ground material information can be taken into consideration for pathfinding. The shortest path can be computed not only considering the physical distance, but also considering the off-road vehicle performance capabilities on different ground surface materials.
Small Drone Field Experiment: Data Collection & Processing
Nov 29, 2017

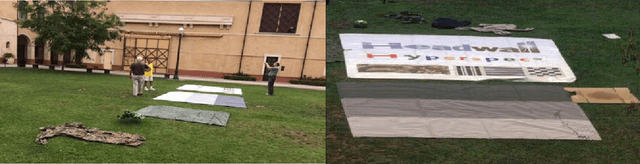
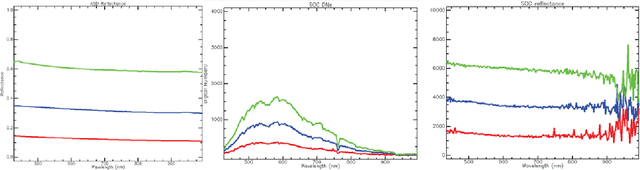
Following an initiative formalized in April 2016 formally known as ARL West between the U.S. Army Research Laboratory (ARL) and University of Southern California's Institute for Creative Technologies (USC ICT), a field experiment was coordinated and executed in the summer of 2016 by ARL, USC ICT, and Headwall Photonics. The purpose was to image part of the USC main campus in Los Angeles, USA, using two portable COTS (commercial off the shelf) aerial drone solutions for data acquisition, for photogrammetry (3D reconstruction from images), and fusion of hyperspectral data with the recovered set of 3D point clouds representing the target area. The research aims for determining the viability of having a machine capable of segmenting the target area into key material classes (e.g., manmade structures, live vegetation, water) for use in multiple purposes, to include providing the user with a more accurate scene understanding and enabling the unsupervised automatic sampling of meaningful material classes from the target area for adaptive semi-supervised machine learning. In the latter, a target set library may be used for automatic machine training with data of local material classes, as an example, to increase the prediction chances of machines recognizing targets. The field experiment and associated data post processing approach to correct for reflectance, geo-rectify, recover the area's dense point clouds from images, register spectral with elevation properties of scene surfaces from the independently collected datasets, and generate the desired scene segmented maps are discussed. Lessons learned from the experience are also highlighted throughout the paper.