 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative Control as Optimization: Time Unconditional Flow Matching for Adaptive and Robust Robotic Control
Mar 18, 2026Diffusion models and flow matching have become a cornerstone of robotic imitation learning, yet they suffer from a structural inefficiency where inference is often bound to a fixed integration schedule that is agnostic to state complexity. This paradigm forces the policy to expend the same computational budget on trivial motions as it does on complex tasks. We introduce Generative Control as Optimization (GeCO), a time-unconditional framework that transforms action synthesis from trajectory integration into iterative optimization. GeCO learns a stationary velocity field in the action-sequence space where expert behaviors form stable attractors. Consequently, test-time inference becomes an adaptive process that allocates computation based on convergence--exiting early for simple states while refining longer for difficult ones. Furthermore, this stationary geometry yields an intrinsic, training-free safety signal, as the field norm at the optimized action serves as a robust out-of-distribution (OOD) detector, remaining low for in-distribution states while significantly increasing for anomalies. We validate GeCO on standard simulation benchmarks and demonstrate seamless scaling to pi0-series Vision-Language-Action (VLA) models. As a plug-and-play replacement for standard flow-matching heads, GeCO improves success rates and efficiency with an optimization-native mechanism for safe deployment. Video and code can be found at https://hrh6666.github.io/GeCO/
TTT-Parkour: Rapid Test-Time Training for Perceptive Robot Parkour
Feb 02, 2026Achieving highly dynamic humanoid parkour on unseen, complex terrains remains a challenge in robotics. Although general locomotion policies demonstrate capabilities across broad terrain distributions, they often struggle with arbitrary and highly challenging environments. To overcome this limitation, we propose a real-to-sim-to-real framework that leverages rapid test-time training (TTT) on novel terrains, significantly enhancing the robot's capability to traverse extremely difficult geometries. We adopt a two-stage end-to-end learning paradigm: a policy is first pre-trained on diverse procedurally generated terrains, followed by rapid fine-tuning on high-fidelity meshes reconstructed from real-world captures. Specifically, we develop a feed-forward, efficient, and high-fidelity geometry reconstruction pipeline using RGB-D inputs, ensuring both speed and quality during test-time training. We demonstrate that TTT-Parkour empowers humanoid robots to master complex obstacles, including wedges, stakes, boxes, trapezoids, and narrow beams. The whole pipeline of capturing, reconstructing, and test-time training requires less than 10 minutes on most tested terrains. Extensive experiments show that the policy after test-time training exhibits robust zero-shot sim-to-real transfer capability.
MoE-Loco: Mixture of Experts for Multitask Locomotion
Mar 11, 2025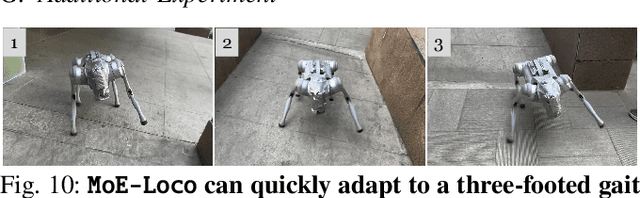

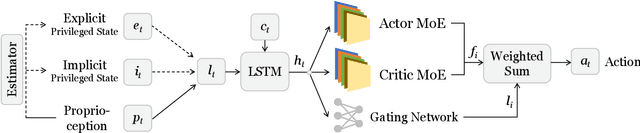
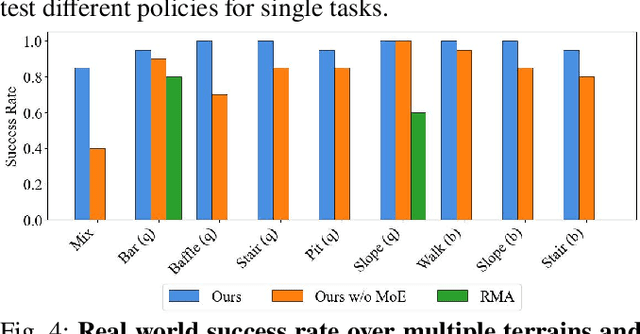
We present MoE-Loco, a Mixture of Experts (MoE) framework for multitask locomotion for legged robots. Our method enables a single policy to handle diverse terrains, including bars, pits, stairs, slopes, and baffles, while supporting quadrupedal and bipedal gaits. Using MoE, we mitigate the gradient conflicts that typically arise in multitask reinforcement learning, improving both training efficiency and performance. Our experiments demonstrate that different experts naturally specialize in distinct locomotion behaviors, which can be leveraged for task migration and skill composition. We further validate our approach in both simulation and real-world deployment, showcasing its robustness and adaptability.
VR-Robo: A Real-to-Sim-to-Real Framework for Visual Robot Navigation and Locomotion
Feb 03, 2025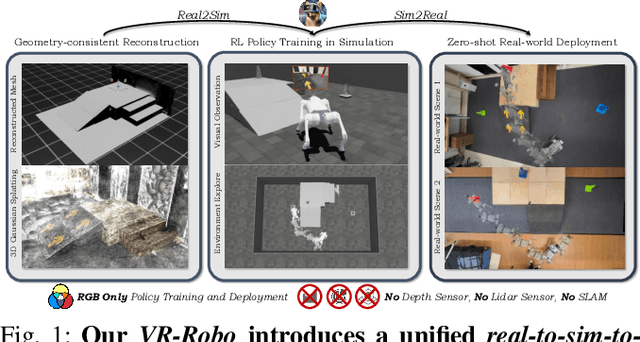
Recent success in legged robot locomotion is attributed to the integration of reinforcement learning and physical simulators. However, these policies often encounter challenges when deployed in real-world environments due to sim-to-real gaps, as simulators typically fail to replicate visual realism and complex real-world geometry. Moreover, the lack of realistic visual rendering limits the ability of these policies to support high-level tasks requiring RGB-based perception like ego-centric navigation. This paper presents a Real-to-Sim-to-Real framework that generates photorealistic and physically interactive "digital twin" simulation environments for visual navigation and locomotion learning. Our approach leverages 3D Gaussian Splatting (3DGS) based scene reconstruction from multi-view images and integrates these environments into simulations that support ego-centric visual perception and mesh-based physical interactions. To demonstrate its effectiveness, we train a reinforcement learning policy within the simulator to perform a visual goal-tracking task. Extensive experiments show that our framework achieves RGB-only sim-to-real policy transfer. Additionally, our framework facilitates the rapid adaptation of robot policies with effective exploration capability in complex new environments, highlighting its potential for applications in households and factories.
Robust Robot Walker: Learning Agile Locomotion over Tiny Traps
Sep 12, 2024
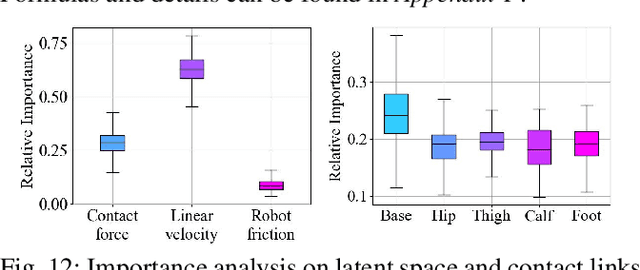


Quadruped robots must exhibit robust walking capabilities in practical applications. In this work, we propose a novel approach that enables quadruped robots to pass various small obstacles, or "tiny traps". Existing methods often rely on exteroceptive sensors, which can be unreliable for detecting such tiny traps. To overcome this limitation, our approach focuses solely on proprioceptive inputs. We introduce a two-stage training framework incorporating a contact encoder and a classification head to learn implicit representations of different traps. Additionally, we design a set of tailored reward functions to improve both the stability of training and the ease of deployment for goal-tracking tasks. To benefit further research, we design a new benchmark for tiny trap task. Extensive experiments in both simulation and real-world settings demonstrate the effectiveness and robustness of our method. Project Page: https://robust-robot-walker.github.io/