 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhase Space Reconstruction Network for Lane Intrusion Action Recognition
Feb 22, 2021

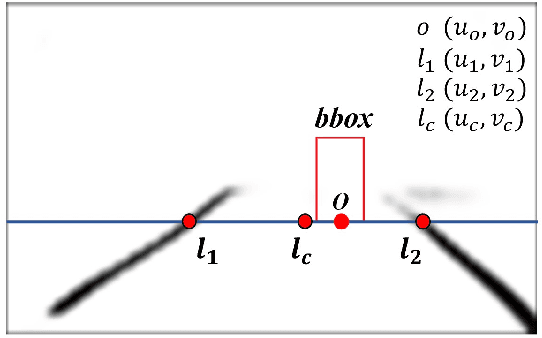
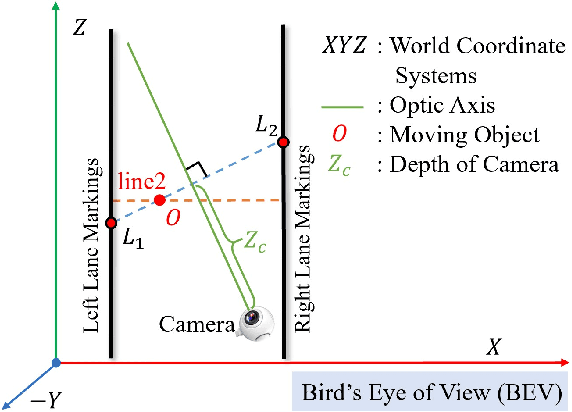
In a complex road traffic scene, illegal lane intrusion of pedestrians or cyclists constitutes one of the main safety challenges in autonomous driving application. In this paper, we propose a novel object-level phase space reconstruction network (PSRNet) for motion time series classification, aiming to recognize lane intrusion actions that occur 150m ahead through a monocular camera fixed on moving vehicle. In the PSRNet, the movement of pedestrians and cyclists, specifically viewed as an observable object-level dynamic process, can be reconstructed as trajectories of state vectors in a latent phase space and further characterized by a learnable Lyapunov exponent-like classifier that indicates discrimination in terms of average exponential divergence of state trajectories. Additionally, in order to first transform video inputs into one-dimensional motion time series of each object, a lane width normalization based on visual object tracking-by-detection is presented. Extensive experiments are conducted on the THU-IntrudBehavior dataset collected from real urban roads. The results show that our PSRNet could reach the best accuracy of 98.0%, which remarkably exceeds existing action recognition approaches by more than 30%.
Multi Scale Temporal Graph Networks For Skeleton-based Action Recognition
Dec 05, 2020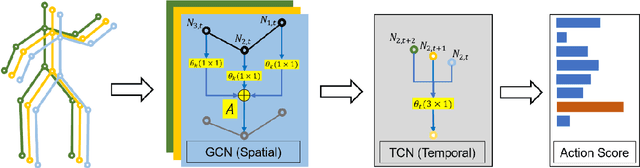
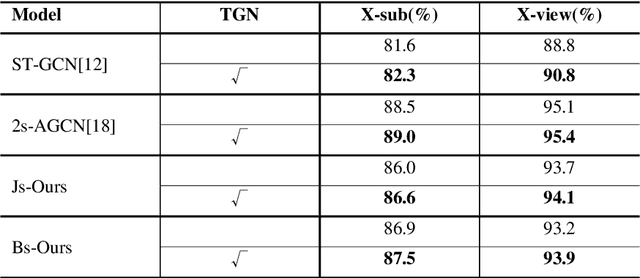

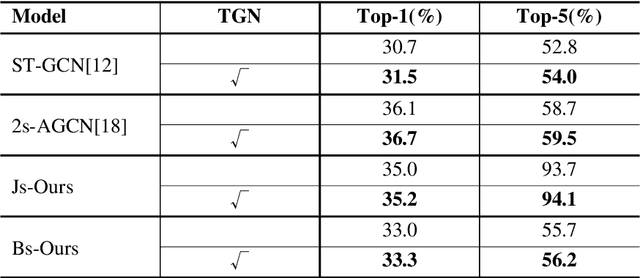
Graph convolutional networks (GCNs) can effectively capture the features of related nodes and improve the performance of the model. More attention is paid to employing GCN in Skeleton-Based action recognition. But existing methods based on GCNs have two problems. First, the consistency of temporal and spatial features is ignored for extracting features node by node and frame by frame. To obtain spatiotemporal features simultaneously, we design a generic representation of skeleton sequences for action recognition and propose a novel model called Temporal Graph Networks (TGN). Secondly, the adjacency matrix of the graph describing the relation of joints is mostly dependent on the physical connection between joints. To appropriately describe the relations between joints in the skeleton graph, we propose a multi-scale graph strategy, adopting a full-scale graph, part-scale graph, and core-scale graph to capture the local features of each joint and the contour features of important joints. Experiments were carried out on two large datasets and results show that TGN with our graph strategy outperforms state-of-the-art methods.
Successive Ray Refinement and Its Application to Coordinate Descent for LASSO
Dec 17, 2015
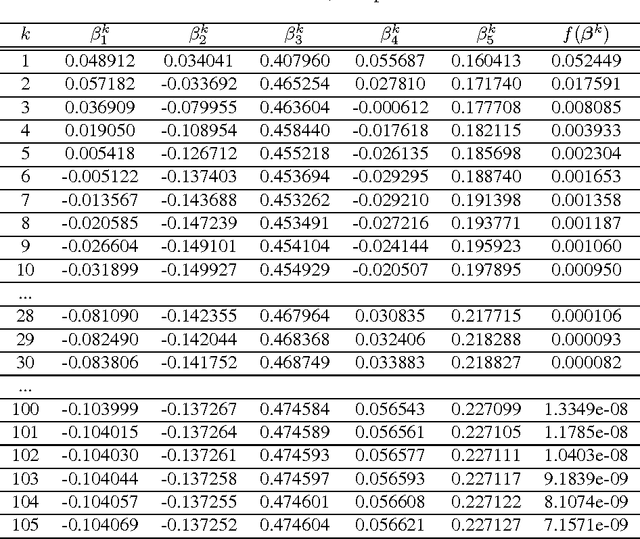


Coordinate descent is one of the most popular approaches for solving Lasso and its extensions due to its simplicity and efficiency. When applying coordinate descent to solving Lasso, we update one coordinate at a time while fixing the remaining coordinates. Such an update, which is usually easy to compute, greedily decreases the objective function value. In this paper, we aim to improve its computational efficiency by reducing the number of coordinate descent iterations. To this end, we propose a novel technique called Successive Ray Refinement (SRR). SRR makes use of the following ray continuation property on the successive iterations: for a particular coordinate, the value obtained in the next iteration almost always lies on a ray that starts at its previous iteration and passes through the current iteration. Motivated by this ray-continuation property, we propose that coordinate descent be performed not directly on the previous iteration but on a refined search point that has the following properties: on one hand, it lies on a ray that starts at a history solution and passes through the previous iteration, and on the other hand, it achieves the minimum objective function value among all the points on the ray. We propose two schemes for defining the search point and show that the refined search point can be efficiently obtained. Empirical results for real and synthetic data sets show that the proposed SRR can significantly reduce the number of coordinate descent iterations, especially for small Lasso regularization parameters.