 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnticipatory Task and Motion Planning
Jul 18, 2024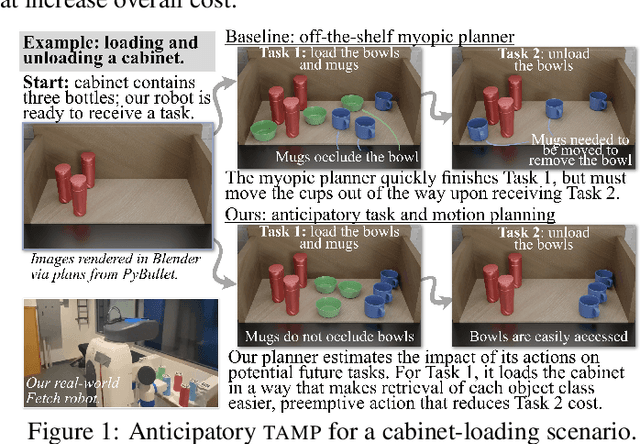



We consider a sequential task and motion planning (tamp) setting in which a robot is assigned continuous-space rearrangement-style tasks one-at-a-time in an environment that persists between each. Lacking advance knowledge of future tasks, existing (myopic) planning strategies unwittingly introduce side effects that impede completion of subsequent tasks: e.g., by blocking future access or manipulation. We present anticipatory task and motion planning, in which estimates of expected future cost from a learned model inform selection of plans generated by a model-based tamp planner so as to avoid such side effects, choosing configurations of the environment that both complete the task and minimize overall cost. Simulated multi-task deployments in navigation-among-movable-obstacles and cabinet-loading domains yield improvements of 32.7% and 16.7% average per-task cost respectively. When given time in advance to prepare the environment, our learning-augmented planning approach yields improvements of 83.1% and 22.3%. Both showcase the value of our approach. Finally, we also demonstrate anticipatory tamp on a real-world Fetch mobile manipulator.
Anticipatory Planning: Improving Long-Lived Planning by Estimating Expected Cost of Future Tasks
May 08, 2023



We consider a service robot in a household environment given a sequence of high-level tasks one at a time. Most existing task planners, lacking knowledge of what they may be asked to do next, solve each task in isolation and so may unwittingly introduce side effects that make subsequent tasks more costly. In order to reduce the overall cost of completing all tasks, we consider that the robot must anticipate the impact its actions could have on future tasks. Thus, we propose anticipatory planning: an approach in which estimates of the expected future cost, from a graph neural network, augment model-based task planning. Our approach guides the robot towards behaviors that encourage preparation and organization, reducing overall costs in long-lived planning scenarios. We evaluate our method on blockworld environments and show that our approach reduces the overall planning costs by 5% as compared to planning without anticipatory planning. Additionally, if given an opportunity to prepare the environment in advance (a special case of anticipatory planning), our planner improves overall cost by 11%.
Room Classification on Floor Plan Graphs using Graph Neural Networks
Aug 12, 2021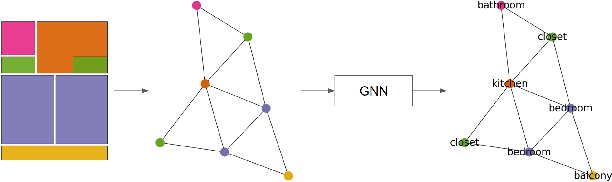
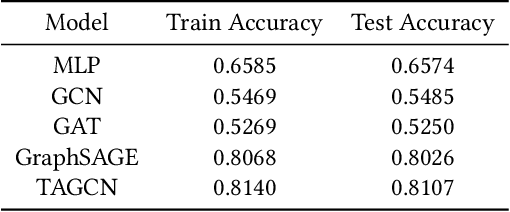
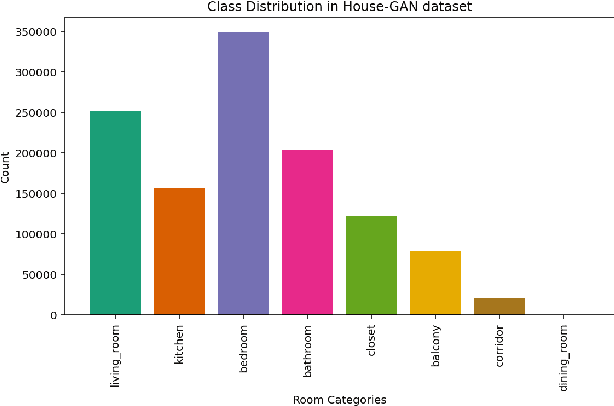
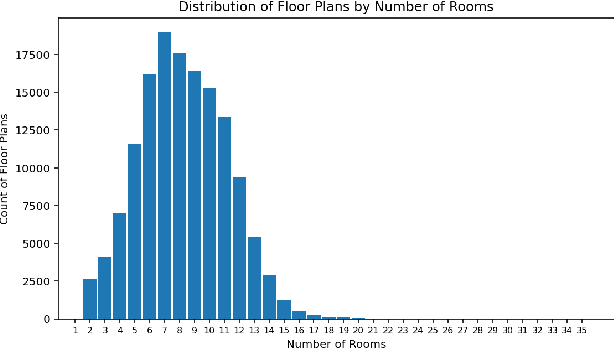
We present our approach to improve room classification task on floor plan maps of buildings by representing floor plans as undirected graphs and leveraging graph neural networks to predict the room categories. Rooms in the floor plans are represented as nodes in the graph with edges representing their adjacency in the map. We experiment with House-GAN dataset that consists of floor plan maps in vector format and train multilayer perceptron and graph neural networks. Our results show that graph neural networks, specifically GraphSAGE and Topology Adaptive GCN were able to achieve accuracy of 80% and 81% respectively outperforming baseline multilayer perceptron by more than 15% margin.