 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnticipatory Task and Motion Planning
Paper and Code
Jul 18, 2024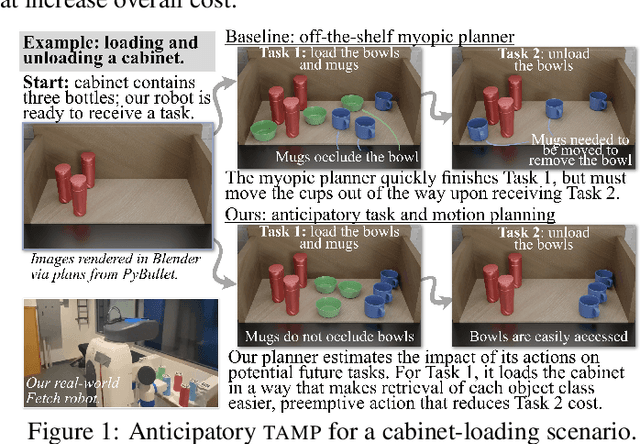



We consider a sequential task and motion planning (tamp) setting in which a robot is assigned continuous-space rearrangement-style tasks one-at-a-time in an environment that persists between each. Lacking advance knowledge of future tasks, existing (myopic) planning strategies unwittingly introduce side effects that impede completion of subsequent tasks: e.g., by blocking future access or manipulation. We present anticipatory task and motion planning, in which estimates of expected future cost from a learned model inform selection of plans generated by a model-based tamp planner so as to avoid such side effects, choosing configurations of the environment that both complete the task and minimize overall cost. Simulated multi-task deployments in navigation-among-movable-obstacles and cabinet-loading domains yield improvements of 32.7% and 16.7% average per-task cost respectively. When given time in advance to prepare the environment, our learning-augmented planning approach yields improvements of 83.1% and 22.3%. Both showcase the value of our approach. Finally, we also demonstrate anticipatory tamp on a real-world Fetch mobile manipulator.