 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Case Study of Spherical Parallel Manipulators Fabricated via Laminate Processes
Sep 24, 2018


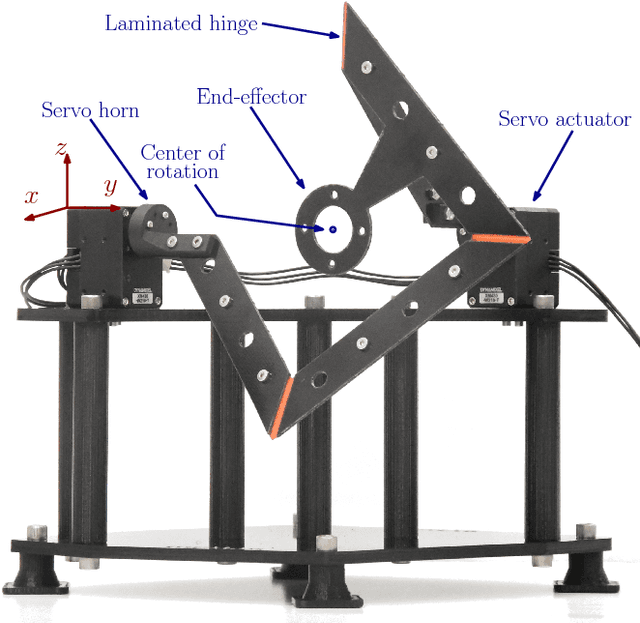
This paper evaluates how laminated techniques may be used to replicate the performance of more traditionally manufactured robotic manipulators. In this case study, we introduce a laminated 2-DOF spherical, parallel manipulator. Taking advantage of laminating techniques in the construction of the robot can result in considerable saving in construction costs and time, but, the challenges caused by this technique have to be addressed. By using stiffer materials in rigid links, the rigidity of the robot is increased to an acceptable level. We discuss one method for compensating position uncertainty via an experimental identification technique which uses a neural network to create a forward kinematic model. Final results show that the proposed mechanism is able to track desired rotation with acceptable precision using open-loop model-based control. This indicates that parallel manipulators fabricated using lamination techniques can provide similar performance with prototypes made in conventional methods.
On Locomotion of a Laminated Fish-inspired robot in a Small-to-size Environment
Aug 28, 2018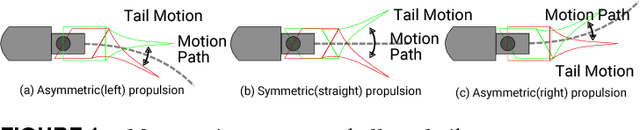
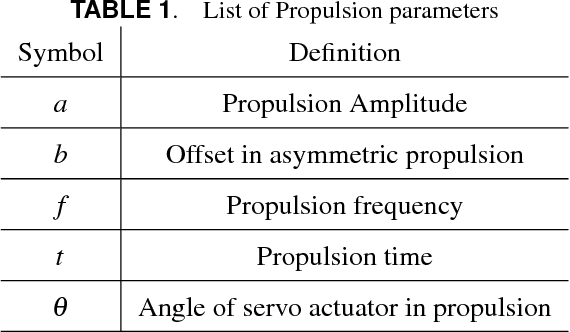
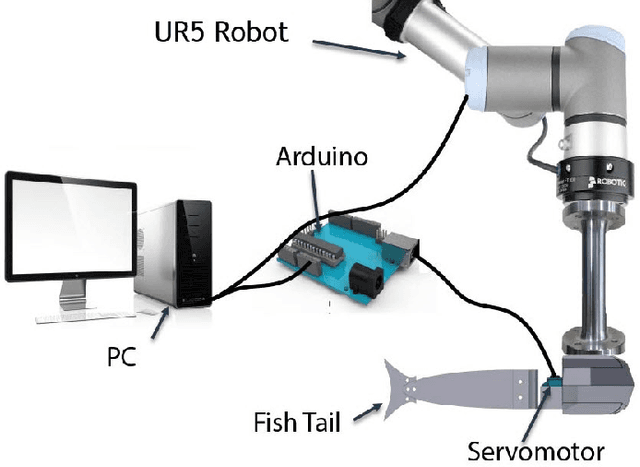
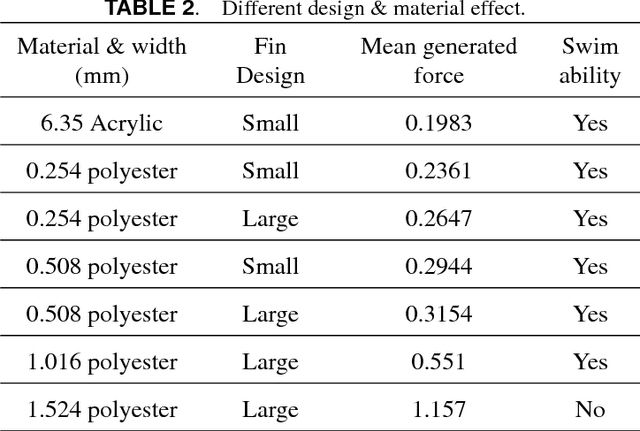
Many different robots have been designed and built to work under water. In many cases, researchers have chosen to use bio-inspired platforms. In most cases, the main goal of the fish inspired robots has been set to autonomously swim and maneuver in an environment spacious compared to the fish's size. In this paper, the identification control of a low-cost fish-inspired robot is studied with the goal of building a mechanism to not only swim in water but able to interact with its narrow environment. The robotic fish under study uses tail propulsion as main locomotion. Moreover, proper propulsion regimes are identified and used to model and control thrust generated by propulsion.
An Integrated Design and Simulation Environment for Rapid Prototyping of Laminate Robotic Mechanisms
Aug 10, 2018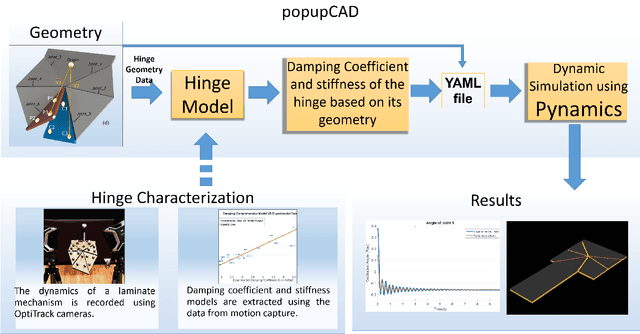
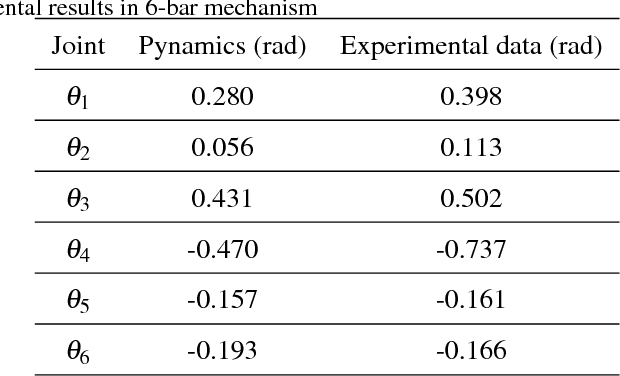
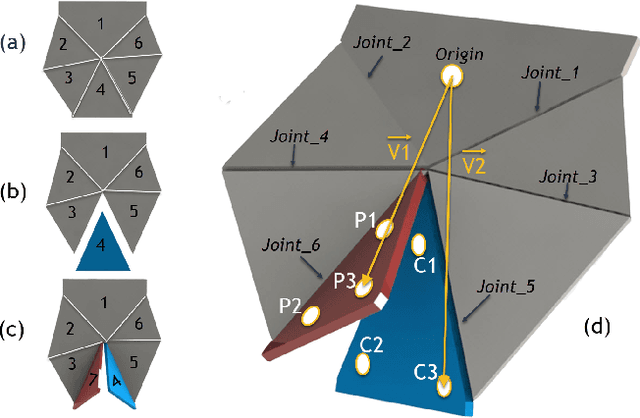

Laminate mechanisms are a reliable concept in producing lowcost robots for educational and commercial purposes. These mechanisms are produced using low-cost manufacturing techniques which have improved significantly during recent years and are more accessible to novices and hobbyists. However, iterating through the design space to come up with the best design for a robot is still a time consuming and rather expensive task and therefore, there is still a need for model-based analysis before manufacturing. Until now, there has been no integrated design and analysis software for laminate robots. This paper addresses some of the issues surrounding laminate analysis by introducing a companion to an existing laminate design tool that automates the generation of dynamic equations and produces simulation results via rendered plots and videos. We have validated the accuracy of the software by comparing the position, velocity and acceleration of the simulated mechanisms with the measurements taken from physical laminate prototypes using a motion capture system.
User oriented assessment of vibration suppression by command shaping in a supernumerary wearable robotic arm
Aug 10, 2018


Supernumerary Robotic Limbs (SRLs) exhibit inherently compliant behavior due to the elasticity present at the intersection of human tissue and the robot. This compliance, can prominently influence the operation of some SRLs, depending on the application. In order to control the residual vibrations of SRLs, we have used an input-shaping method which is a computationally inexpensive approach. The effectiveness of this method in controlling the residual vibrations of a SRL has been proven using robustness analysis. User studies show that reducing the vibrations using input shaping directly increases the user satisfaction and comfort by at least 9%. It is also observed that 36% of the users preferred unshaped commands. We hypothesize that the shaped commands put a higher cognitive load on the user compared to unshaped commands. This shows that when dealing with human-robot interaction, user satisfaction becomes an equally important parameter as traditional performance criteria and should be taken into account while evaluating the success of any vibration-control method.
Code-division multiplexed resistive pulse sensor networks for spatio-temporal detection of particles in microfluidic devices
Aug 10, 2018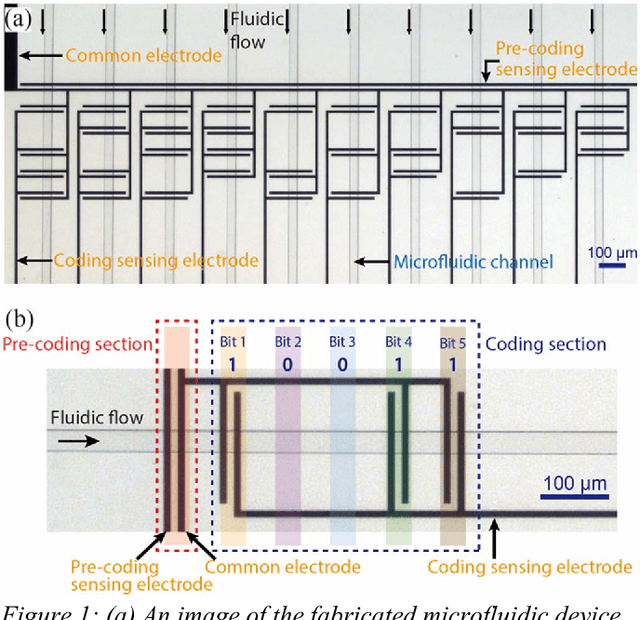
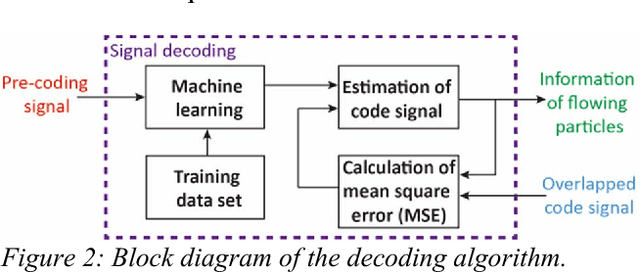
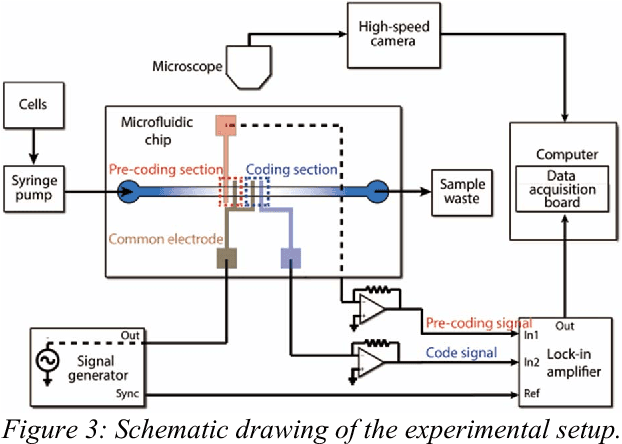
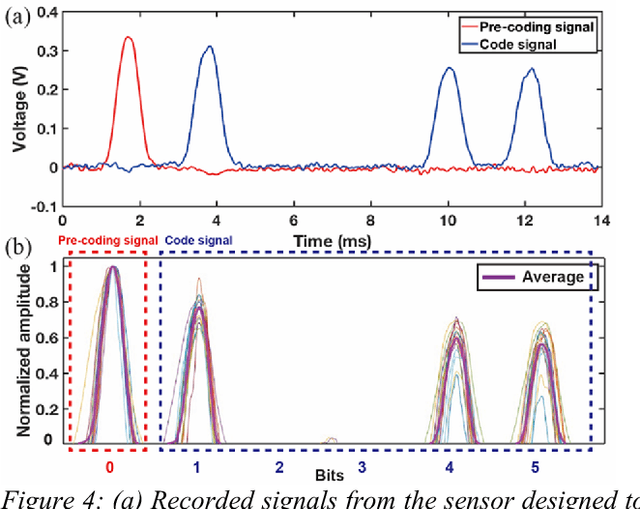
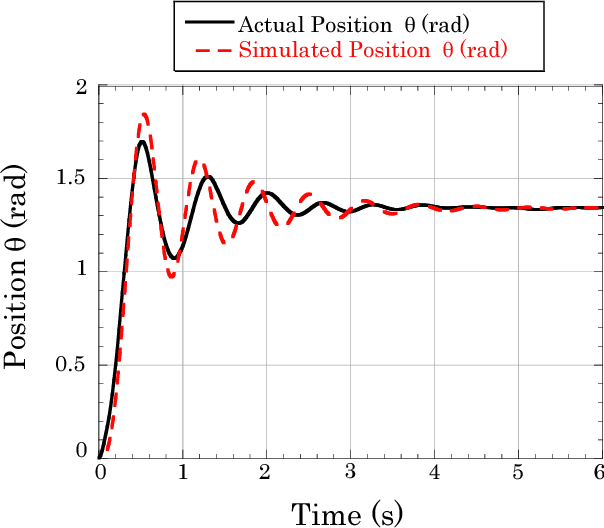
Spatial separation of suspended particles based on contrast in their physical or chemical properties forms the basis of various biological assays performed on lab-on-achip devices. To electronically acquire this information, we have recently introduced a microfluidic sensing platform, called Microfluidic CODES, which combines the resistive pulse sensing with the code division multiple access in multiplexing a network of integrated electrical sensors. In this paper, we enhance the multiplexing capacity of the Microfluidic CODES by employing sensors that generate non-orthogonal code waveforms and a new decoding algorithm that combines machine learning techniques with minimum mean-squared error estimation. As a proof of principle, we fabricated a microfluidic device with a network of 10 code-multiplexed sensors and characterized it using cells suspended in phosphate buffer saline solution.
A Novel Tactile Force Probe for Tissue Stiffness Classification
Aug 08, 2018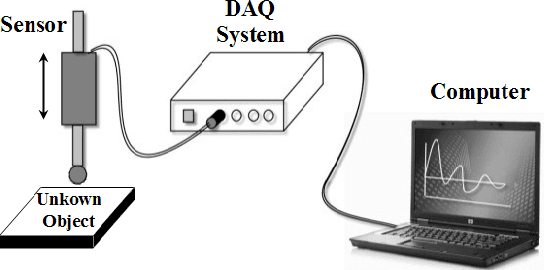
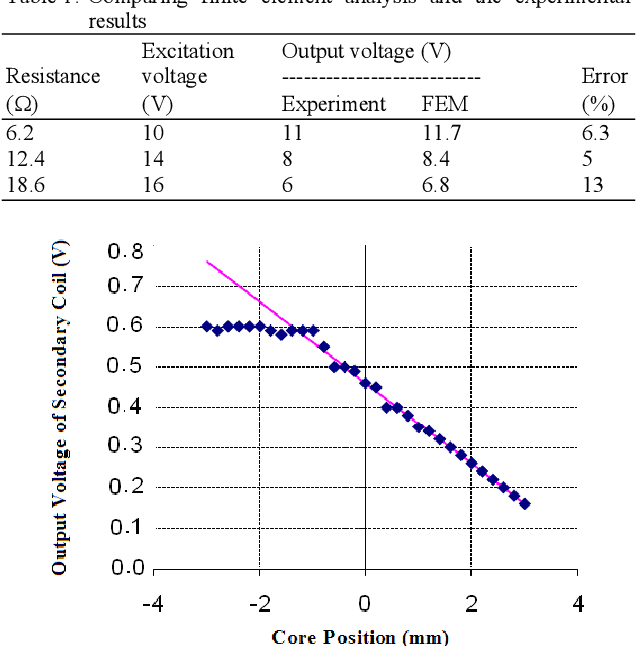
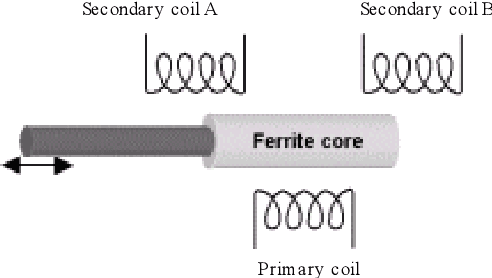
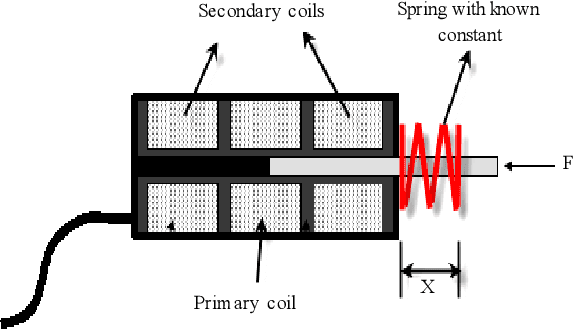
In this study, we have proposed a new type of tactile sensor that is capable of detecting the stiffness of soft objects. The sensor consists of a brass cylinder with an axial bore. An iron core can easily move inside the bore. Three peripheral bobbins were machined in the cylinder around which three coils have been wound. One of the coils was excited with an alternating current which caused a voltage to be induced in two other coils. A return spring was used to return the core to its initial position after it has been moved. The sensor was pressed against the surface of the object whose stiffness was going to be measured. The position of the core in this state was depended on the stiffness of the given object and the spring constant and was measured by measuring the change in the induced voltage in secondary coils. The proposed sensor was capable of measuring two contact parameters namely the applied force and the stiffness of the object. Using the data of this sensor, three different objects, made of polyurethane, silicon rubber and paraffin gel were discriminated. Thus, this sensor could be used in robot hands and minimally invasive surgery tools to improve their operation.