 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Case Study of Spherical Parallel Manipulators Fabricated via Laminate Processes
Sep 24, 2018


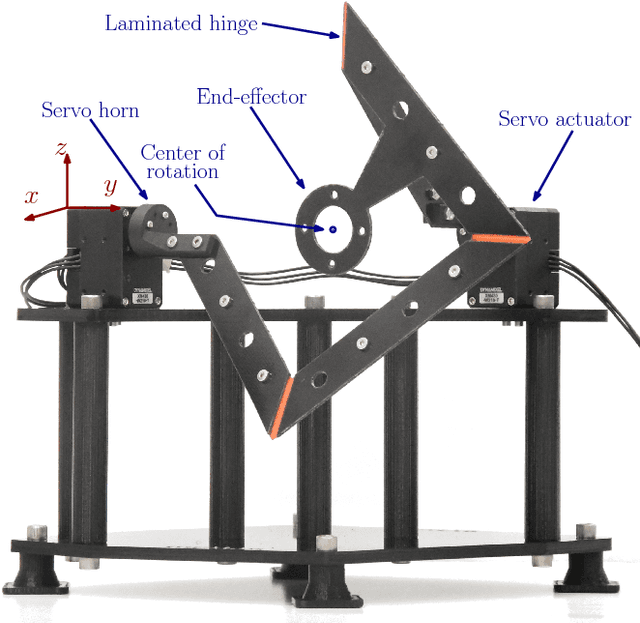
This paper evaluates how laminated techniques may be used to replicate the performance of more traditionally manufactured robotic manipulators. In this case study, we introduce a laminated 2-DOF spherical, parallel manipulator. Taking advantage of laminating techniques in the construction of the robot can result in considerable saving in construction costs and time, but, the challenges caused by this technique have to be addressed. By using stiffer materials in rigid links, the rigidity of the robot is increased to an acceptable level. We discuss one method for compensating position uncertainty via an experimental identification technique which uses a neural network to create a forward kinematic model. Final results show that the proposed mechanism is able to track desired rotation with acceptable precision using open-loop model-based control. This indicates that parallel manipulators fabricated using lamination techniques can provide similar performance with prototypes made in conventional methods.
On Locomotion of a Laminated Fish-inspired robot in a Small-to-size Environment
Aug 28, 2018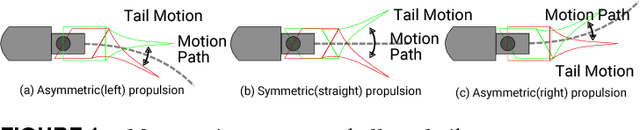
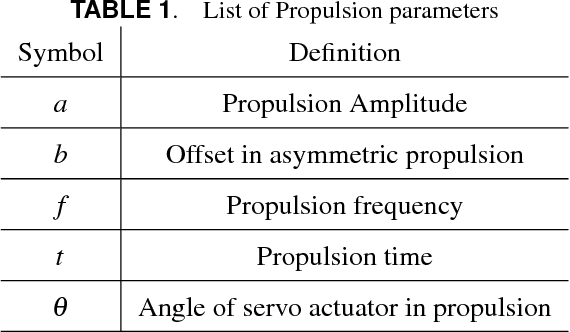
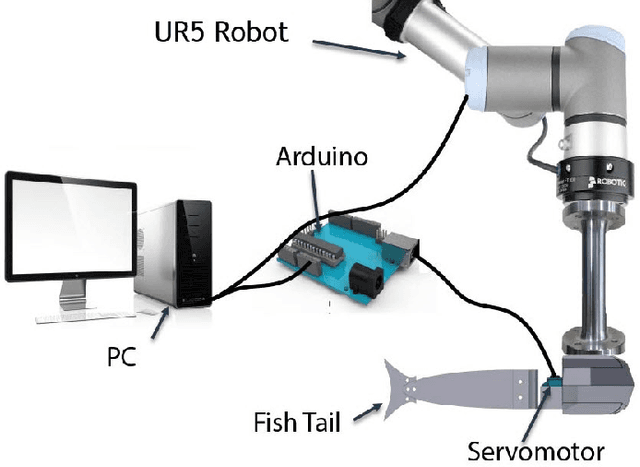
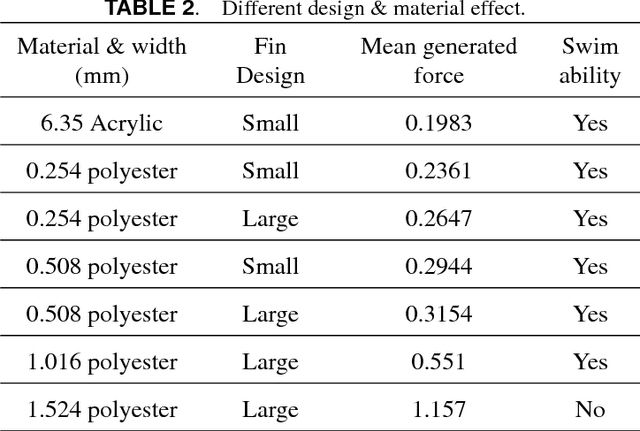
Many different robots have been designed and built to work under water. In many cases, researchers have chosen to use bio-inspired platforms. In most cases, the main goal of the fish inspired robots has been set to autonomously swim and maneuver in an environment spacious compared to the fish's size. In this paper, the identification control of a low-cost fish-inspired robot is studied with the goal of building a mechanism to not only swim in water but able to interact with its narrow environment. The robotic fish under study uses tail propulsion as main locomotion. Moreover, proper propulsion regimes are identified and used to model and control thrust generated by propulsion.