 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Visibility Limits: A DRL-Based Navigation Strategy for Unexpected Obstacles
Mar 03, 2025



Distance-based reward mechanisms in deep reinforcement learning (DRL) navigation systems suffer from critical safety limitations in dynamic environments, frequently resulting in collisions when visibility is restricted. We propose DRL-NSUO, a novel navigation strategy for unexpected obstacles that leverages the rate of change in LiDAR data as a dynamic environmental perception element. Our approach incorporates a composite reward function with environmental change rate constraints and dynamically adjusted weights through curriculum learning, enabling robots to autonomously balance between path efficiency and safety maximization. We enhance sensitivity to nearby obstacles by implementing short-range feature preprocessing of LiDAR data. Experimental results demonstrate that this method significantly improves both robot and pedestrian safety in complex scenarios compared to traditional DRL-based methods. When evaluated on the BARN navigation dataset, our method achieved superior performance with success rates of 94.0% at 0.5 m/s and 91.0% at 1.0 m/s, outperforming conservative obstacle expansion strategies. These results validate DRL-NSUO's enhanced practicality and safety for human-robot collaborative environments, including intelligent logistics applications.
Video-based Cross-modal Auxiliary Network for Multimodal Sentiment Analysis
Aug 30, 2022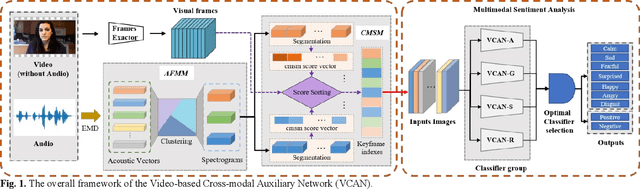



Multimodal sentiment analysis has a wide range of applications due to its information complementarity in multimodal interactions. Previous works focus more on investigating efficient joint representations, but they rarely consider the insufficient unimodal features extraction and data redundancy of multimodal fusion. In this paper, a Video-based Cross-modal Auxiliary Network (VCAN) is proposed, which is comprised of an audio features map module and a cross-modal selection module. The first module is designed to substantially increase feature diversity in audio feature extraction, aiming to improve classification accuracy by providing more comprehensive acoustic representations. To empower the model to handle redundant visual features, the second module is addressed to efficiently filter the redundant visual frames during integrating audiovisual data. Moreover, a classifier group consisting of several image classification networks is introduced to predict sentiment polarities and emotion categories. Extensive experimental results on RAVDESS, CMU-MOSI, and CMU-MOSEI benchmarks indicate that VCAN is significantly superior to the state-of-the-art methods for improving the classification accuracy of multimodal sentiment analysis.