 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbability estimation and structured output prediction for learning preferences in last mile delivery
Jan 25, 2022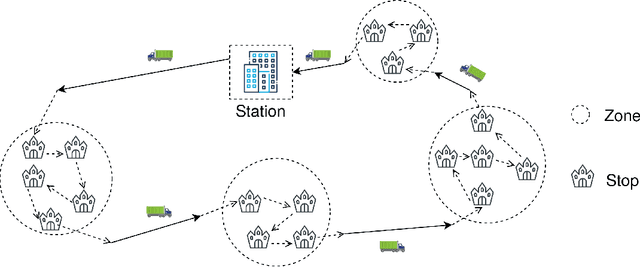
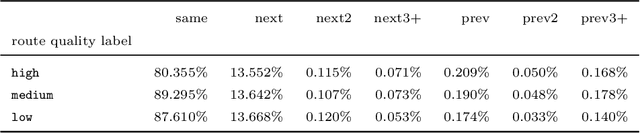
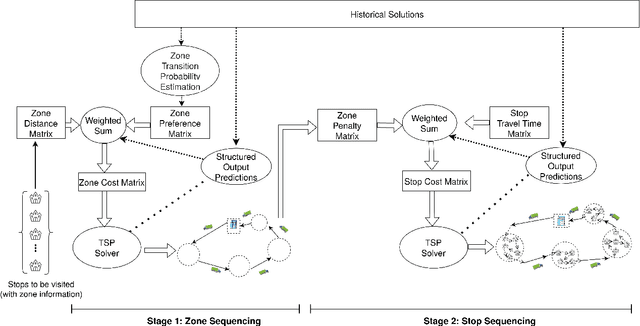
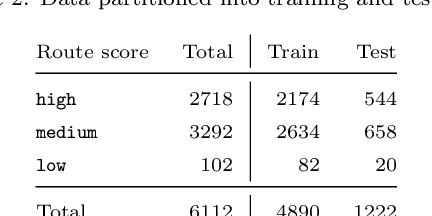
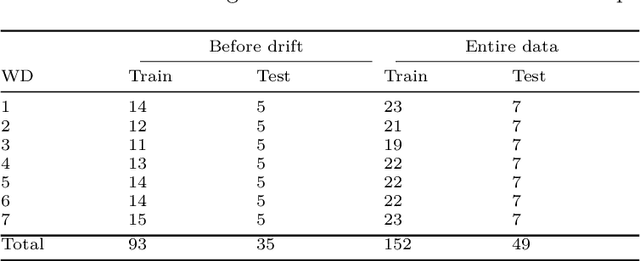
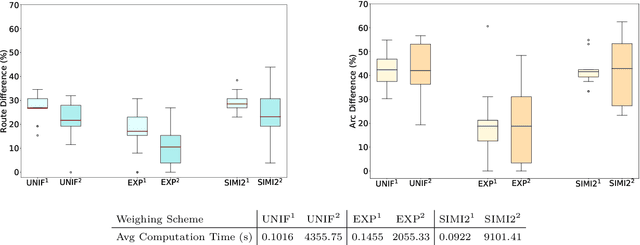
We study the problem of learning the preferences of drivers and planners in the context of last mile delivery. Given a data set containing historical decisions and delivery locations, the goal is to capture the implicit preferences of the decision-makers. We consider two ways to use the historical data: one is through a probability estimation method that learns transition probabilities between stops (or zones). This is a fast and accurate method, recently studied in a VRP setting. Furthermore, we explore the use of machine learning to infer how to best balance multiple objectives such as distance, probability and penalties. Specifically, we cast the learning problem as a structured output prediction problem, where training is done by repeatedly calling the TSP solver. Another important aspect we consider is that for last-mile delivery, every address is a potential client and hence the data is very sparse. Hence, we propose a two-stage approach that first learns preferences at the zone level in order to compute a zone routing; after which a penalty-based TSP computes the stop routing. Results show that the zone transition probability estimation performs well, and that the structured output prediction learning can improve the results further. We hence showcase a successful combination of both probability estimation and machine learning, all the while using standard TSP solvers, both during learning and to compute the final solution; this means the methodology is applicable to other, real-life, TSP variants, or proprietary solvers.
Data Driven VRP: A Neural Network Model to Learn Hidden Preferences for VRP
Aug 27, 2021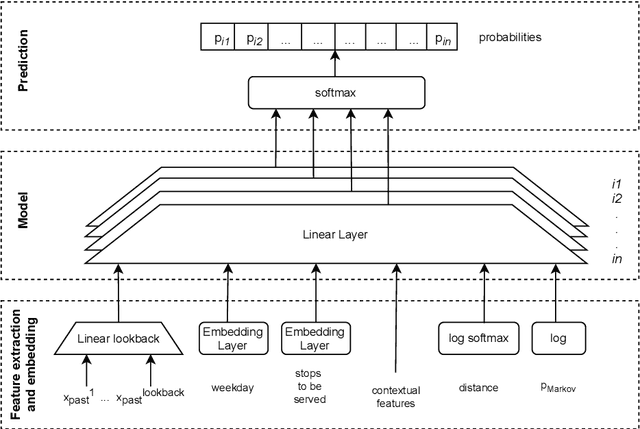
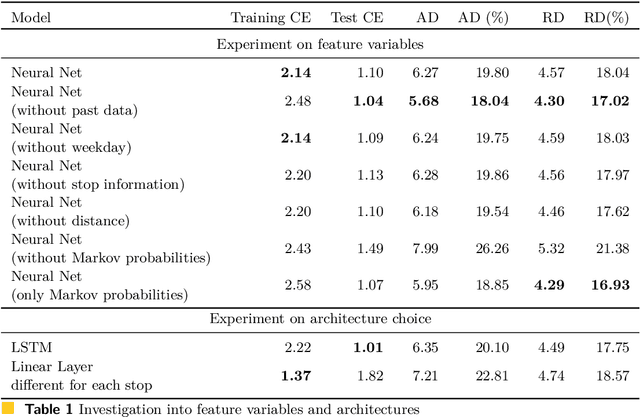
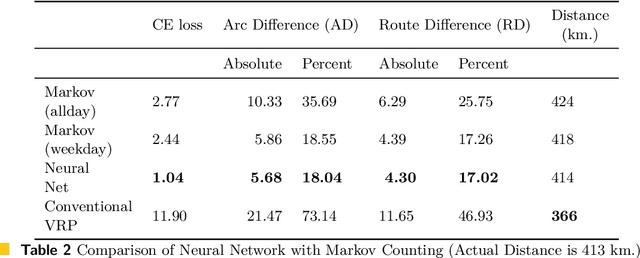
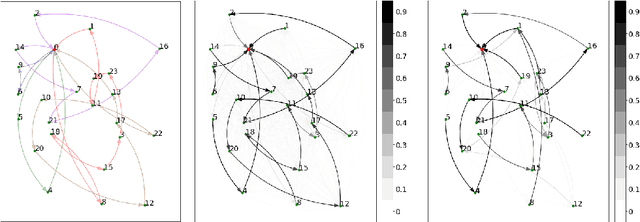
The traditional Capacitated Vehicle Routing Problem (CVRP) minimizes the total distance of the routes under the capacity constraints of the vehicles. But more often, the objective involves multiple criteria including not only the total distance of the tour but also other factors such as travel costs, travel time, and fuel consumption.Moreover, in reality, there are numerous implicit preferences ingrained in the minds of the route planners and the drivers. Drivers, for instance, have familiarity with certain neighborhoods and knowledge of the state of roads, and often consider the best places for rest and lunch breaks. This knowledge is difficult to formulate and balance when operational routing decisions have to be made. This motivates us to learn the implicit preferences from past solutions and to incorporate these learned preferences in the optimization process. These preferences are in the form of arc probabilities, i.e., the more preferred a route is, the higher is the joint probability. The novelty of this work is the use of a neural network model to estimate the arc probabilities, which allows for additional features and automatic parameter estimation. This first requires identifying suitable features, neural architectures and loss functions, taking into account that there is typically few data available. We investigate the difference with a prior weighted Markov counting approach, and study the applicability of neural networks in this setting.
Learn-n-Route: Learning implicit preferences for vehicle routing
Jan 11, 2021
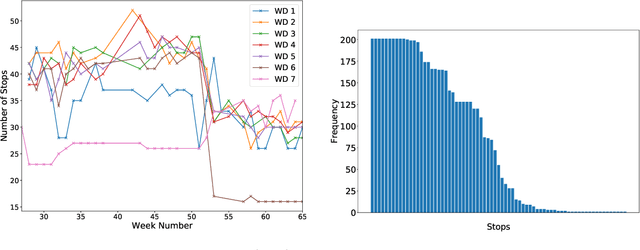
We investigate a learning decision support system for vehicle routing, where the routing engine learns implicit preferences that human planners have when manually creating route plans (or routings). The goal is to use these learned subjective preferences on top of the distance-based objective criterion in vehicle routing systems. This is an alternative to the practice of distinctively formulating a custom VRP for every company with its own routing requirements. Instead, we assume the presence of past vehicle routing solutions over similar sets of customers, and learn to make similar choices. The learning approach is based on the concept of learning a Markov model, which corresponds to a probabilistic transition matrix, rather than a deterministic distance matrix. This nevertheless allows us to use existing arc routing VRP software in creating the actual routings, and to optimize over both distances and preferences at the same time. For the learning, we explore different schemes to construct the probabilistic transition matrix that can co-evolve with changing preferences over time. Our results on a use-case with a small transportation company show that our method is able to generate results that are close to the manually created solutions, without needing to characterize all constraints and sub-objectives explicitly. Even in the case of changes in the customer sets, our method is able to find solutions that are closer to the actual routings than when using only distances, and hence, solutions that require fewer manual changes when transformed into practical routings.
Hybrid Classification and Reasoning for Image-based Constraint Solving
Mar 24, 2020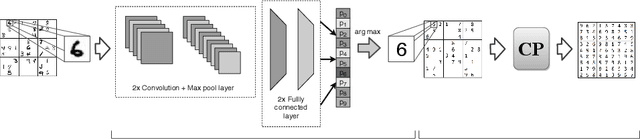
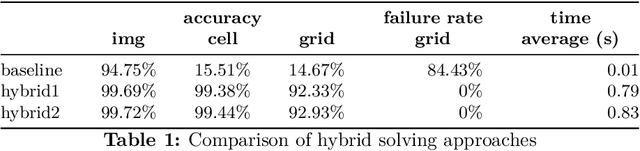
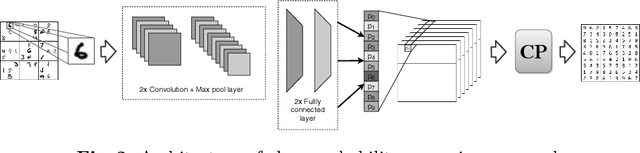
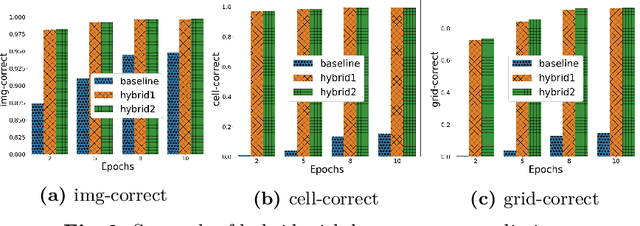
There is an increased interest in solving complex constrained problems where part of the input is not given as facts but received as raw sensor data such as images or speech. We will use "visual sudoku" as a prototype problem, where the given cell digits are handwritten and provided as an image thereof. In this case, one first has to train and use a classifier to label the images, so that the labels can be used for solving the problem. In this paper, we explore the hybridization of classifying the images with the reasoning of a constraint solver. We show that pure constraint reasoning on predictions does not give satisfactory results. Instead, we explore the possibilities of a tighter integration, by exposing the probabilistic estimates of the classifier to the constraint solver. This allows joint inference on these probabilistic estimates, where we use the solver to find the maximum likelihood solution. We explore the trade-off between the power of the classifier and the power of the constraint reasoning, as well as further integration through the additional use of structural knowledge. Furthermore, we investigate the effect of calibration of the probabilistic estimates on the reasoning. Our results show that such hybrid approaches vastly outperform a separate approach, which encourages a further integration of prediction (probabilities) and constraint solving.
Vehicle routing by learning from historical solutions
Sep 17, 2019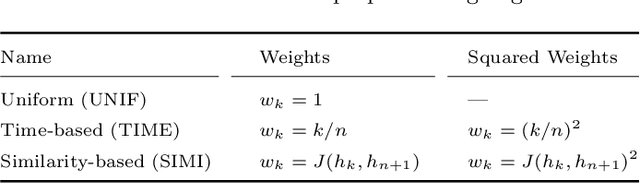


The goal of this paper is to investigate a decision support system for vehicle routing, where the routing engine learns from the subjective decisions that human planners have made in the past, rather than optimizing a distance-based objective criterion. This is an alternative to the practice of formulating a custom VRP for every company with its own routing requirements. Instead, we assume the presence of past vehicle routing solutions over similar sets of customers, and learn to make similar choices. The approach is based on the concept of learning a first-order Markov model, which corresponds to a probabilistic transition matrix, rather than a deterministic distance matrix. This nevertheless allows us to use existing arc routing VRP software in creating the actual route plans. For the learning, we explore different schemes to construct the probabilistic transition matrix. Our results on a use-case with a small transportation company show that our method is able to generate results that are close to the manually created solutions, without needing to characterize all constraints and sub-objectives explicitly. Even in the case of changes in the client sets, our method is able to find solutions that are closer to the actual route plans than when using distances, and hence, solutions that would require fewer manual changes to transform into the actual route plan.