 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge2D LiDAR and Camera Fusion Using Motion Cues for Indoor Layout Estimation
Apr 24, 2022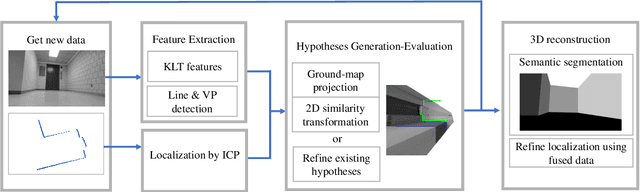
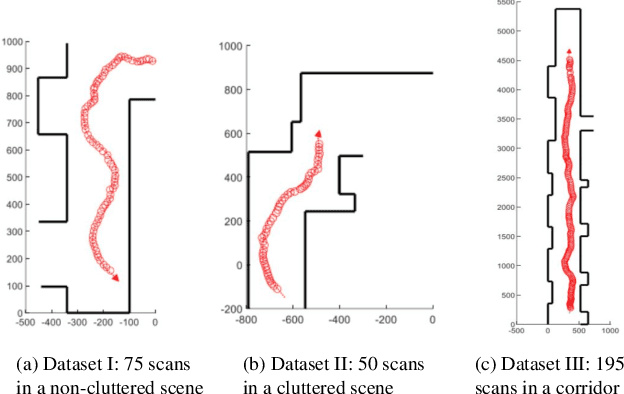
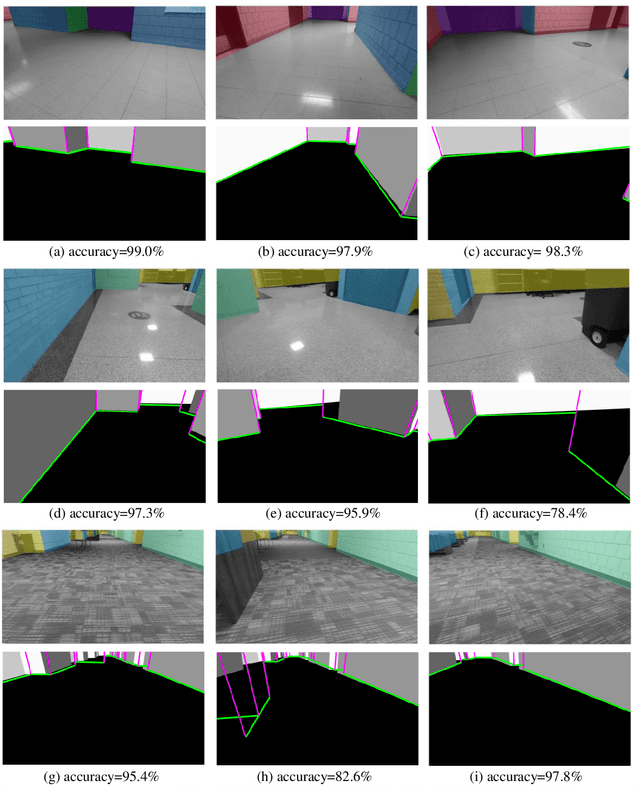
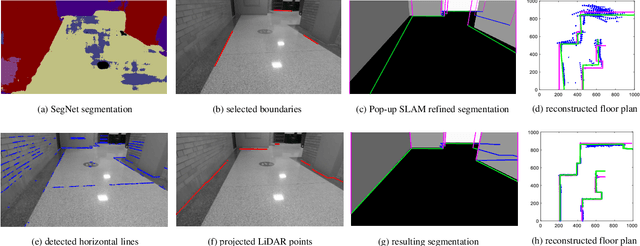
This paper presents a novel indoor layout estimation system based on the fusion of 2D LiDAR and intensity camera data. A ground robot explores an indoor space with a single floor and vertical walls, and collects a sequence of intensity images and 2D LiDAR datasets. The LiDAR provides accurate depth information, while the camera captures high-resolution data for semantic interpretation. The alignment of sensor outputs and image segmentation are computed jointly by aligning LiDAR points, as samples of the room contour, to ground-wall boundaries in the images. The alignment problem is decoupled into a top-down view projection and a 2D similarity transformation estimation, which can be solved according to the vertical vanishing point and motion of two sensors. The recursive random sample consensus algorithm is implemented to generate, evaluate and optimize multiple hypotheses with the sequential measurements. The system allows jointly analyzing the geometric interpretation from different sensors without offline calibration. The ambiguity in images for ground-wall boundary extraction is removed with the assistance of LiDAR observations, which improves the accuracy of semantic segmentation. The localization and mapping is refined using the fused data, which enables the system to work reliably in scenes with low texture or low geometric features.
Affinity Mixup for Weakly Supervised Sound Event Detection
Jun 21, 2021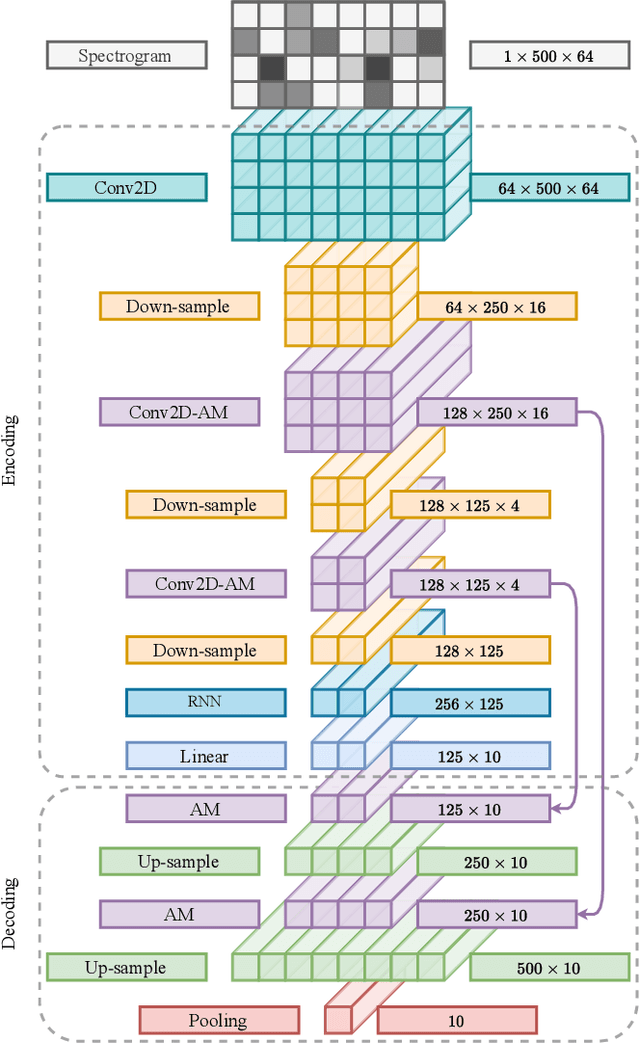
The weakly supervised sound event detection problem is the task of predicting the presence of sound events and their corresponding starting and ending points in a weakly labeled dataset. A weak dataset associates each training sample (a short recording) to one or more present sources. Networks that solely rely on convolutional and recurrent layers cannot directly relate multiple frames in a recording. Motivated by attention and graph neural networks, we introduce the concept of an affinity mixup to incorporate time-level similarities and make a connection between frames. This regularization technique mixes up features in different layers using an adaptive affinity matrix. Our proposed affinity mixup network improves over state-of-the-art techniques event-F1 scores by $8.2\%$.
Optimization of Graph Neural Networks with Natural Gradient Descent
Aug 21, 2020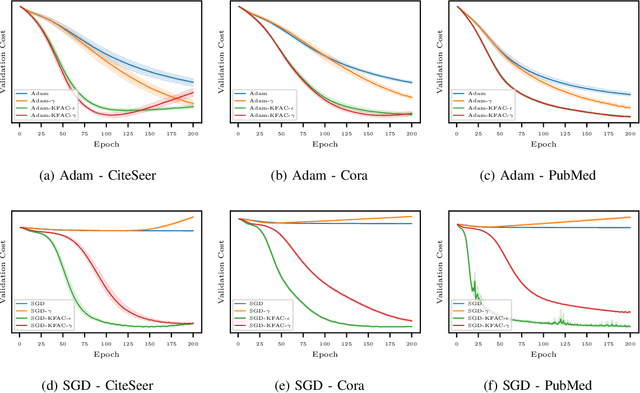
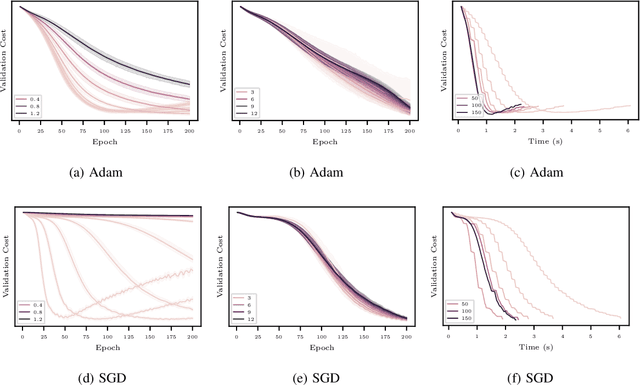
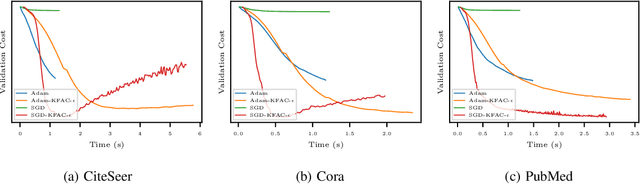
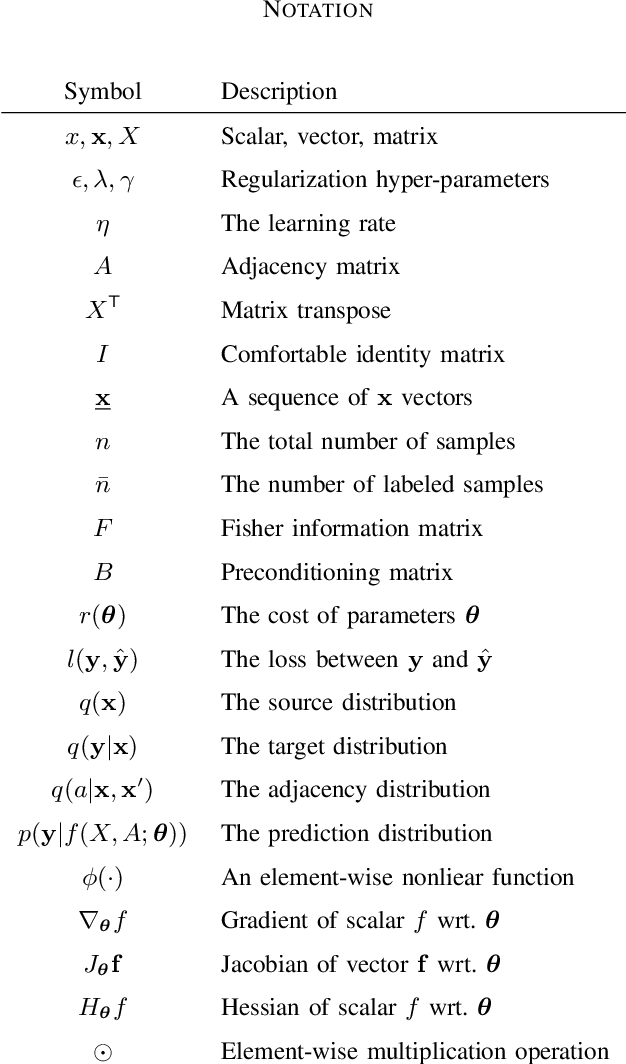
In this work, we propose to employ information-geometric tools to optimize a graph neural network architecture such as the graph convolutional networks. More specifically, we develop optimization algorithms for the graph-based semi-supervised learning by employing the natural gradient information in the optimization process. This allows us to efficiently exploit the geometry of the underlying statistical model or parameter space for optimization and inference. To the best of our knowledge, this is the first work that has utilized the natural gradient for the optimization of graph neural networks that can be extended to other semi-supervised problems. Efficient computations algorithms are developed and extensive numerical studies are conducted to demonstrate the superior performance of our algorithms over existing algorithms such as ADAM and SGD.