 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge2D LiDAR and Camera Fusion Using Motion Cues for Indoor Layout Estimation
Paper and Code
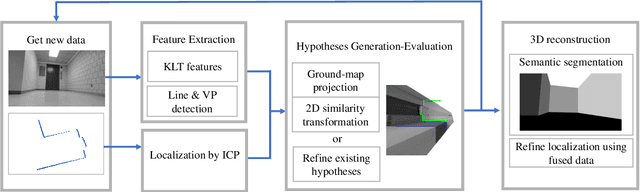
This paper presents a novel indoor layout estimation system based on the fusion of 2D LiDAR and intensity camera data. A ground robot explores an indoor space with a single floor and vertical walls, and collects a sequence of intensity images and 2D LiDAR datasets. The LiDAR provides accurate depth information, while the camera captures high-resolution data for semantic interpretation. The alignment of sensor outputs and image segmentation are computed jointly by aligning LiDAR points, as samples of the room contour, to ground-wall boundaries in the images. The alignment problem is decoupled into a top-down view projection and a 2D similarity transformation estimation, which can be solved according to the vertical vanishing point and motion of two sensors. The recursive random sample consensus algorithm is implemented to generate, evaluate and optimize multiple hypotheses with the sequential measurements. The system allows jointly analyzing the geometric interpretation from different sensors without offline calibration. The ambiguity in images for ground-wall boundary extraction is removed with the assistance of LiDAR observations, which improves the accuracy of semantic segmentation. The localization and mapping is refined using the fused data, which enables the system to work reliably in scenes with low texture or low geometric features.