 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Learning-Based Incipient Slip Detection using the PapillArray Optical Tactile Sensor for Improved Robotic Gripping
Jul 08, 2023The ability to detect slip, particularly incipient slip, enables robotic systems to take corrective measures to prevent a grasped object from being dropped. Therefore, slip detection can enhance the overall security of robotic gripping. However, accurately detecting incipient slip remains a significant challenge. In this paper, we propose a novel learning-based approach to detect incipient slip using the PapillArray (Contactile, Australia) tactile sensor. The resulting model is highly effective in identifying patterns associated with incipient slip, achieving a detection success rate of 95.6% when tested with an offline dataset. Furthermore, we introduce several data augmentation methods to enhance the robustness of our model. When transferring the trained model to a robotic gripping environment distinct from where the training data was collected, our model maintained robust performance, with a success rate of 96.8%, providing timely feedback for stabilizing several practical gripping tasks. Our project website: https://sites.google.com/view/incipient-slip-detection.
Shape of synth to come: Why we should use synthetic data for English surface realization
May 06, 2020
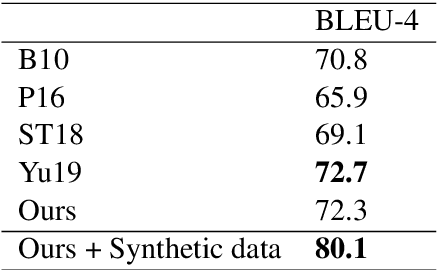
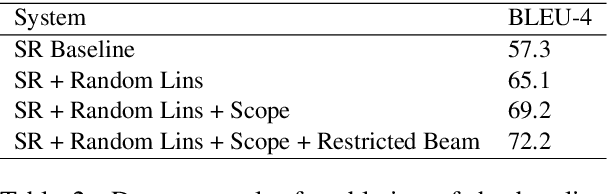
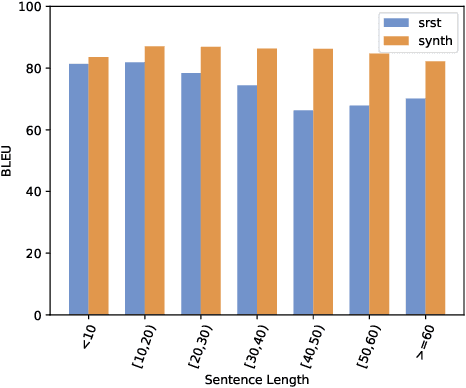
The Surface Realization Shared Tasks of 2018 and 2019 were Natural Language Generation shared tasks with the goal of exploring approaches to surface realization from Universal-Dependency-like trees to surface strings for several languages. In the 2018 shared task there was very little difference in the absolute performance of systems trained with and without additional, synthetically created data, and a new rule prohibiting the use of synthetic data was introduced for the 2019 shared task. Contrary to the findings of the 2018 shared task, we show, in experiments on the English 2018 dataset, that the use of synthetic data can have a substantial positive effect - an improvement of almost 8 BLEU points for a previously state-of-the-art system. We analyse the effects of synthetic data, and we argue that its use should be encouraged rather than prohibited so that future research efforts continue to explore systems that can take advantage of such data.