 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Technologies for AI Hubs
Jun 07, 2023

AI requires heavy amounts of storage and compute with assets that are commonly stored in AI Hubs. AI Hubs have contributed significantly to the democratization of AI. However, existing implementations are associated with certain benefits and limitations that stem from the underlying infrastructure and governance systems with which they are built. These limitations include high costs, lack of monetization and reward, lack of control and difficulty of reproducibility. In the current work, we explore the potential of decentralized technologies - such as Web3 wallets, peer-to-peer marketplaces, storage and compute, and DAOs - to address some of these issues. We suggest that these infrastructural components can be used in combination in the design and construction of decentralized AI Hubs.
* arXiv admin note: substantial text overlap with arXiv:2210.16651
A Blockchain Protocol for Human-in-the-Loop AI
Nov 20, 2022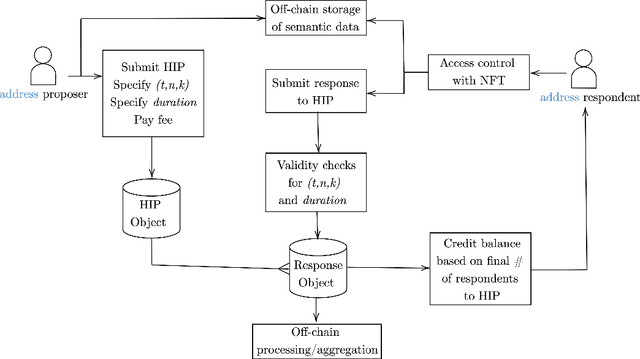

Intelligent human inputs are required both in the training and operation of AI systems, and within the governance of blockchain systems and decentralized autonomous organizations (DAOs). This paper presents a formal definition of Human Intelligence Primitives (HIPs), and describes the design and implementation of an Ethereum protocol for their on-chain collection, modeling, and integration in machine learning workflows.
Addressing Bias in Face Detectors using Decentralised Data collection with incentives
Oct 28, 2022Recent developments in machine learning have shown that successful models do not rely only on huge amounts of data but the right kind of data. We show in this paper how this data-centric approach can be facilitated in a decentralized manner to enable efficient data collection for algorithms. Face detectors are a class of models that suffer heavily from bias issues as they have to work on a large variety of different data. We also propose a face detection and anonymization approach using a hybrid MultiTask Cascaded CNN with FaceNet Embeddings to benchmark multiple datasets to describe and evaluate the bias in the models towards different ethnicities, gender, and age groups along with ways to enrich fairness in a decentralized system of data labeling, correction, and verification by users to create a robust pipeline for model retraining.
* 8 pages. Accepted at NeurIPS 2022 Workshop on Decentralization & Trustworthy Machine Learning in Web3
Jointformer: Single-Frame Lifting Transformer with Error Prediction and Refinement for 3D Human Pose Estimation
Aug 07, 2022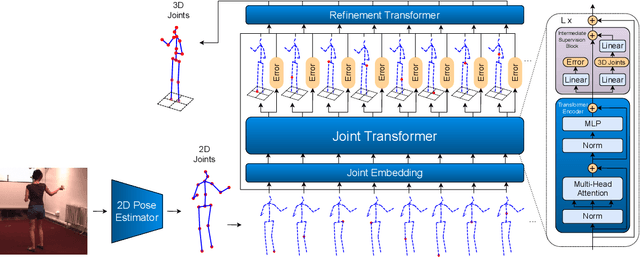
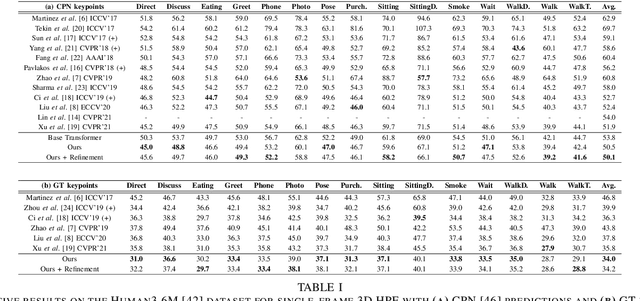
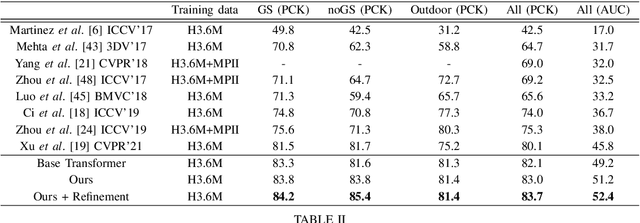
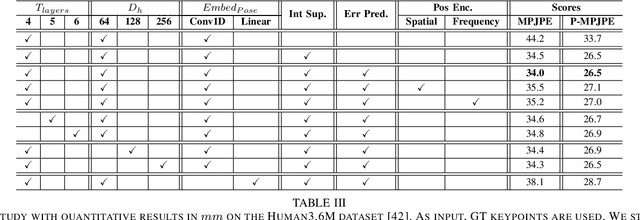
Monocular 3D human pose estimation technologies have the potential to greatly increase the availability of human movement data. The best-performing models for single-image 2D-3D lifting use graph convolutional networks (GCNs) that typically require some manual input to define the relationships between different body joints. We propose a novel transformer-based approach that uses the more generalised self-attention mechanism to learn these relationships within a sequence of tokens representing joints. We find that the use of intermediate supervision, as well as residual connections between the stacked encoders benefits performance. We also suggest that using error prediction as part of a multi-task learning framework improves performance by allowing the network to compensate for its confidence level. We perform extensive ablation studies to show that each of our contributions increases performance. Furthermore, we show that our approach outperforms the recent state of the art for single-frame 3D human pose estimation by a large margin. Our code and trained models are made publicly available on Github.
KinePose: A temporally optimized inverse kinematics technique for 6DOF human pose estimation with biomechanical constraints
Jul 26, 2022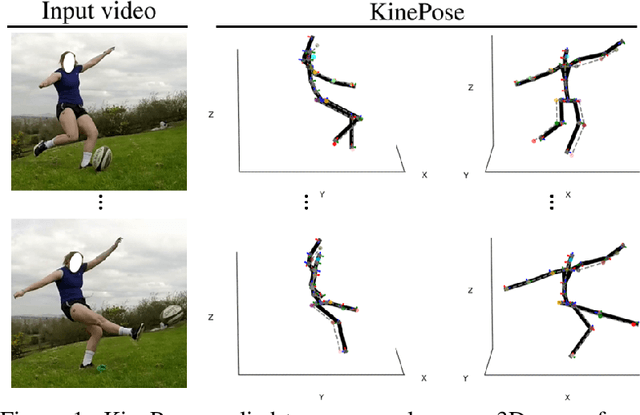

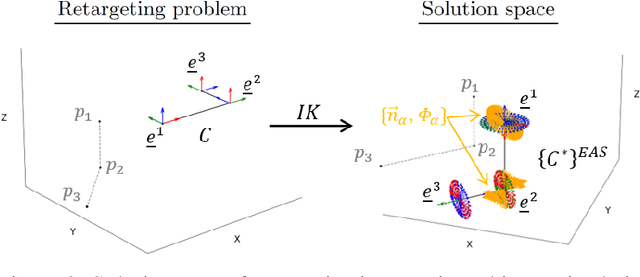
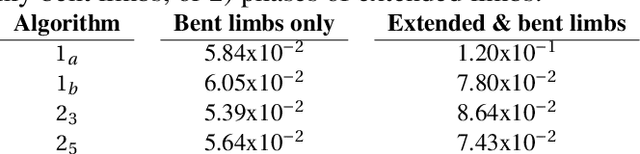
Computer vision/deep learning-based 3D human pose estimation methods aim to localize human joints from images and videos. Pose representation is normally limited to 3D joint positional/translational degrees of freedom (3DOFs), however, a further three rotational DOFs (6DOFs) are required for many potential biomechanical applications. Positional DOFs are insufficient to analytically solve for joint rotational DOFs in a 3D human skeletal model. Therefore, we propose a temporal inverse kinematics (IK) optimization technique to infer joint orientations throughout a biomechanically informed, and subject-specific kinematic chain. For this, we prescribe link directions from a position-based 3D pose estimate. Sequential least squares quadratic programming is used to solve a minimization problem that involves both frame-based pose terms, and a temporal term. The solution space is constrained using joint DOFs, and ranges of motion (ROMs). We generate 3D pose motion sequences to assess the IK approach both for general accuracy, and accuracy in boundary cases. Our temporal algorithm achieves 6DOF pose estimates with low Mean Per Joint Angular Separation (MPJAS) errors (3.7{\deg}/joint overall, & 1.6{\deg}/joint for lower limbs). With frame-by-frame IK we obtain low errors in the case of bent elbows and knees, however, motion sequences with phases of extended/straight limbs results in ambiguity in twist angle. With temporal IK, we reduce ambiguity for these poses, resulting in lower average errors.
* https://kevgildea.github.io/KinePose/