 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinimizing Turns in Watchman Robot Navigation: Strategies and Solutions
Aug 19, 2023The Orthogonal Watchman Route Problem (OWRP) entails the search for the shortest path, known as the watchman route, that a robot must follow within a polygonal environment. The primary objective is to ensure that every point in the environment remains visible from at least one point on the route, allowing the robot to survey the entire area in a single, continuous sweep. This research places particular emphasis on reducing the number of turns in the route, as it is crucial for optimizing navigation in watchman routes within the field of robotics. The cost associated with changing direction is of significant importance, especially for specific types of robots. This paper introduces an efficient linear-time algorithm for solving the OWRP under the assumption that the environment is monotone. The findings of this study contribute to the progress of robotic systems by enabling the design of more streamlined patrol robots. These robots are capable of efficiently navigating complex environments while minimizing the number of turns. This advancement enhances their coverage and surveillance capabilities, making them highly effective in various real-world applications.
* 6 pages, 3 figures
Navigating Occluded Intersections with Autonomous Vehicles using Deep Reinforcement Learning
Feb 27, 2018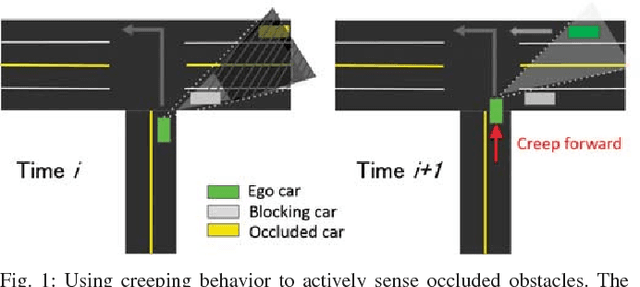

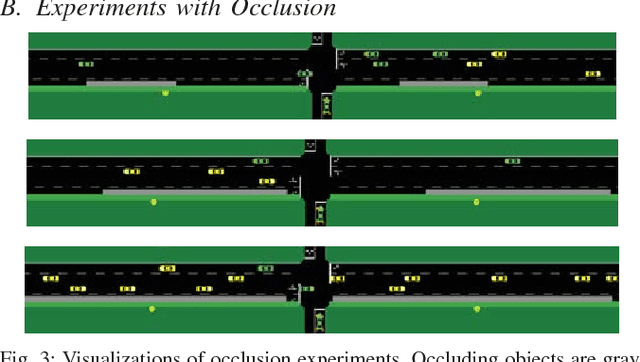
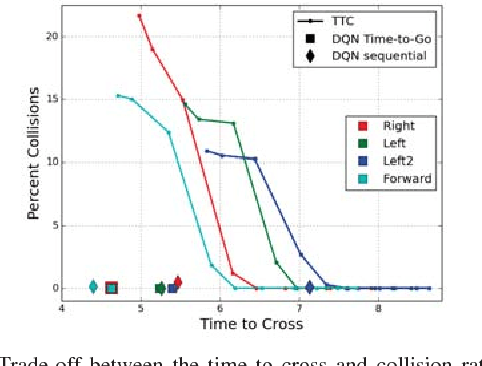
Providing an efficient strategy to navigate safely through unsignaled intersections is a difficult task that requires determining the intent of other drivers. We explore the effectiveness of Deep Reinforcement Learning to handle intersection problems. Using recent advances in Deep RL, we are able to learn policies that surpass the performance of a commonly-used heuristic approach in several metrics including task completion time and goal success rate and have limited ability to generalize. We then explore a system's ability to learn active sensing behaviors to enable navigating safely in the case of occlusions. Our analysis, provides insight into the intersection handling problem, the solutions learned by the network point out several shortcomings of current rule-based methods, and the failures of our current deep reinforcement learning system point to future research directions.