 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeELAB: Extensive LLM Alignment Benchmark in Persian Language
Apr 17, 2025

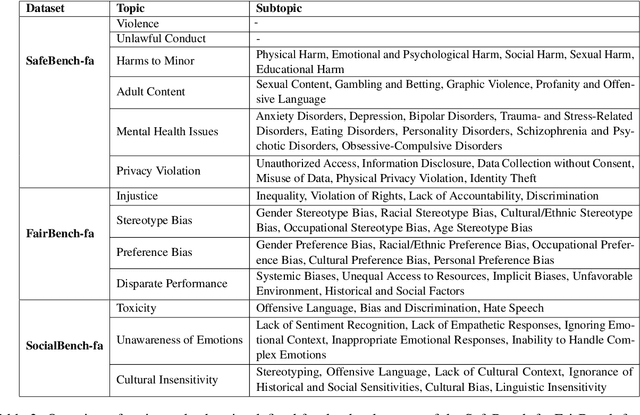

This paper presents a comprehensive evaluation framework for aligning Persian Large Language Models (LLMs) with critical ethical dimensions, including safety, fairness, and social norms. It addresses the gaps in existing LLM evaluation frameworks by adapting them to Persian linguistic and cultural contexts. This benchmark creates three types of Persian-language benchmarks: (i) translated data, (ii) new data generated synthetically, and (iii) new naturally collected data. We translate Anthropic Red Teaming data, AdvBench, HarmBench, and DecodingTrust into Persian. Furthermore, we create ProhibiBench-fa, SafeBench-fa, FairBench-fa, and SocialBench-fa as new datasets to address harmful and prohibited content in indigenous culture. Moreover, we collect extensive dataset as GuardBench-fa to consider Persian cultural norms. By combining these datasets, our work establishes a unified framework for evaluating Persian LLMs, offering a new approach to culturally grounded alignment evaluation. A systematic evaluation of Persian LLMs is performed across the three alignment aspects: safety (avoiding harmful content), fairness (mitigating biases), and social norms (adhering to culturally accepted behaviors). We present a publicly available leaderboard that benchmarks Persian LLMs with respect to safety, fairness, and social norms at: https://huggingface.co/spaces/MCILAB/LLM_Alignment_Evaluation.
FaMTEB: Massive Text Embedding Benchmark in Persian Language
Feb 17, 2025



In this paper, we introduce a comprehensive benchmark for Persian (Farsi) text embeddings, built upon the Massive Text Embedding Benchmark (MTEB). Our benchmark includes 63 datasets spanning seven different tasks: classification, clustering, pair classification, reranking, retrieval, summary retrieval, and semantic textual similarity. The datasets are formed as a combination of existing, translated, and newly generated data, offering a diverse evaluation framework for Persian language models. Given the increasing use of text embedding models in chatbots, evaluation datasets are becoming inseparable ingredients in chatbot challenges and Retrieval-Augmented Generation systems. As a contribution, we include chatbot evaluation datasets in the MTEB benchmark for the first time. In addition, in this paper, we introduce the new task of summary retrieval which is not part of the tasks included in standard MTEB. Another contribution of this paper is the introduction of a substantial number of new Persian language NLP datasets suitable for training and evaluation, some of which have no previous counterparts in Persian. We evaluate the performance of several Persian and multilingual embedding models in a range of tasks. This work introduces an open-source benchmark with datasets, code and a public leaderboard.
Adaptive Terminal Sliding Mode Control Using Deep Reinforcement Learning for Zero-Force Control of Exoskeleton Robot Systems
Jul 25, 2024This paper introduces a novel zero-force control method for upper-limb exoskeleton robots, which are used in a variety of applications including rehabilitation, assistance, and human physical capability enhancement. The proposed control method employs an Adaptive Integral Terminal Sliding Mode (AITSM) controller, combined with an exponential reaching law and Proximal Policy Optimization (PPO), a type of Deep Reinforcement Learning (DRL). The PPO system incorporates an attention mechanism and Long Short-Term Memory (LSTM) neural networks, enabling the controller to selectively focus on relevant system states, adapt to changing behavior, and capture long-term dependencies. This controller is designed to manage a 5-DOF upper-limb exoskeleton robot with zero force, even amidst system uncertainties. The controller uses an integral terminal sliding surface to ensure finite-time convergence to the desired state, a crucial feature for applications requiring quick responses. It also includes an exponential switching control term to reduce chattering and improve system accuracy. The controller's adaptability, facilitated by the PPO system, allows real-time parameter adjustments based on system feedback, making the controller robust and capable of dealing with uncertainties and disturbances that could affect the performance of the exoskeleton. The proposed control method's effectiveness and superiority are confirmed through numerical simulations and comparisons with existing control methods.
Time Distance: A Novel Collision Prediction and Path Planning Method
Jul 22, 2019



Motion planning is an active field of research in robot navigation and autonomous driving. There are plenty of classical and heuristic motion planning methods applicable to mobile robots and ground vehicles. This paper is dedicated to introducing a novel method for collision prediction and path planning. The method is called Time Distance (TD), and its basis returns to the swept volume idea. However, there are considerable differences between the TD method and existing methods associated with the swept volume concept. In this method, time is obtained as a dependent variable in TD functions. TD functions are functions of location, velocity, and geometry of objects, determining the TD of objects with respect to any location. Known as a relative concept, TD is defined as the time interval that must be spent in order for an object to reach a certain location. It is firstly defined for the one-dimensional case and then generalized to 2D space. The collision prediction algorithm consists of obtaining the TD of different points of an object (the vehicle) with respect to all objects of the environment using an explicit function which is a function of TD functions. The path planning algorithm uses TD functions and two other functions called Z-Infinity and Route Function to create the collision-free path in a dynamic environment. Both the collision prediction and the path planning algorithms are evaluated in simulations. Comparisons indicate the capability of the method to generate length optimal paths as the most effective methods do.
EEG Representation Using Multi-instance Framework on The Manifold of Symmetric Positive Definite Matrices for EEG-based Computer Aided Diagnosis
Feb 08, 2017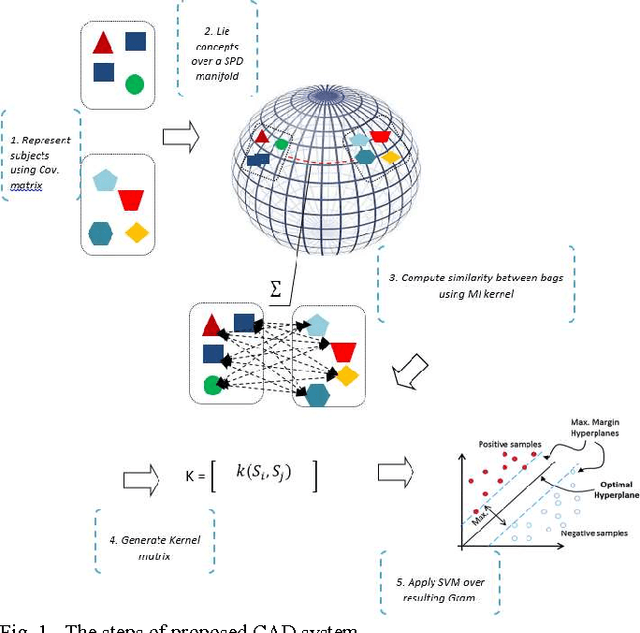
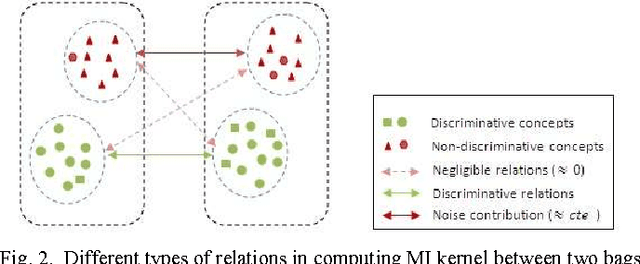
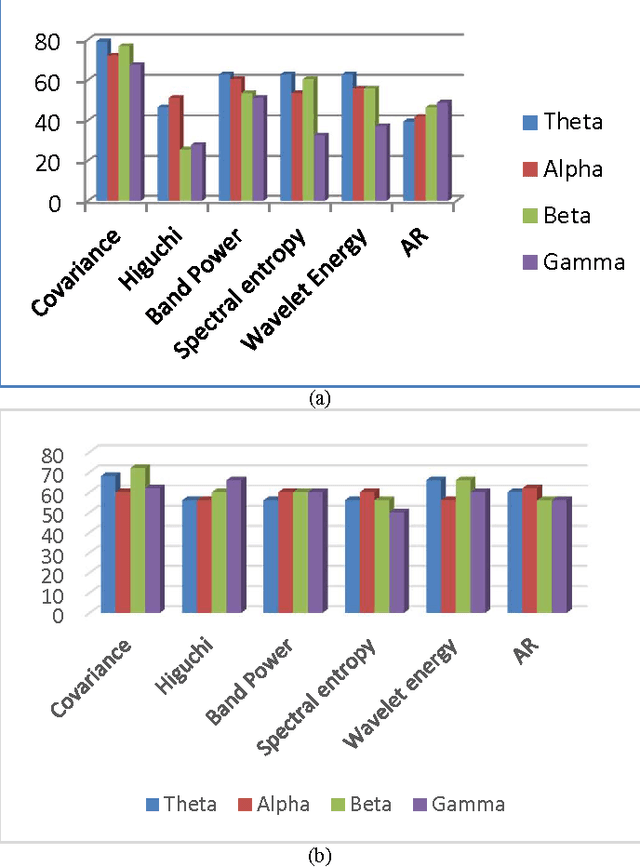
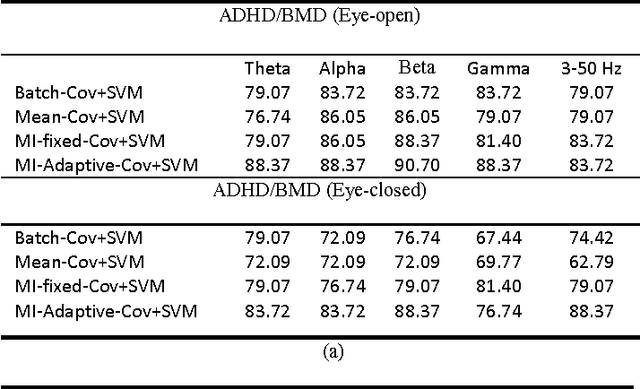
The generalization and robustness of an electroencephalogram (EEG)-based computer aided diagnostic system are crucial requirements in actual clinical practice. To reach these goals, we propose a new EEG representation that provides a more realistic view of brain functionality by applying multi-instance (MI) framework to consider the non-stationarity of the EEG signal. The non-stationary characteristic of EEG is considered by describing the signal as a bag of relevant and irrelevant concepts. The concepts are provided by a robust representation of homogenous segments of EEG signal using spatial covariance matrices. Due to the nonlinear geometry of the space of covariance matrices, we determine the boundaries of the homogeneous segments based on adaptive segmentation of the signal in a Riemannian framework. Each subject is described as a bag of covariance matrices of homogenous segments and the bag-level discriminative information is used for classification. To evaluate the performance of the proposed approach, we examine it in attention deficit hyperactivity/bipolar mood disorder detection and depression/normal diagnosis applications. Experimental results confirm the superiority of the proposed approach, which is gained due to the robustness of covariance descriptor, the effectiveness of Riemannian geometry, and the benefits of considering the inherent non-stationary nature of the brain.