 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUPPLIED: UAV Path Planning for Inspection through Demonstration
Mar 07, 2023



In this paper, a new demonstration-based path-planning framework for the visual inspection of large structures using UAVs is proposed. We introduce UPPLIED: UAV Path PLanning for InspEction through Demonstration, which utilizes a demonstrated trajectory to generate a new trajectory to inspect other structures of the same kind. The demonstrated trajectory can inspect specific regions of the structure and the new trajectory generated by UPPLIED inspects similar regions in the other structure. The proposed method generates inspection points from the demonstrated trajectory and uses standardization to translate those inspection points to inspect the new structure. Finally, the position of these inspection points is optimized to refine their view. Numerous experiments were conducted with various structures and the proposed framework was able to generate inspection trajectories of various kinds for different structures based on the demonstration. The trajectories generated match with the demonstrated trajectory in geometry and at the same time inspect the regions inspected by the demonstration trajectory with minimum deviation. The experimental video of the work can be found at https://youtu.be/YqPx-cLkv04.
SMARTmBOT: A ROS2-based Low-cost and Open-source Mobile Robot Platform
Mar 16, 2022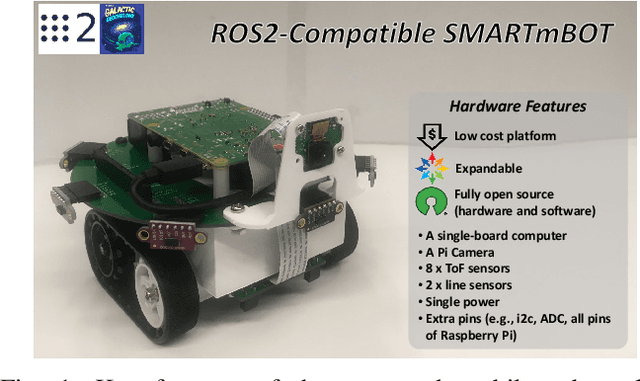
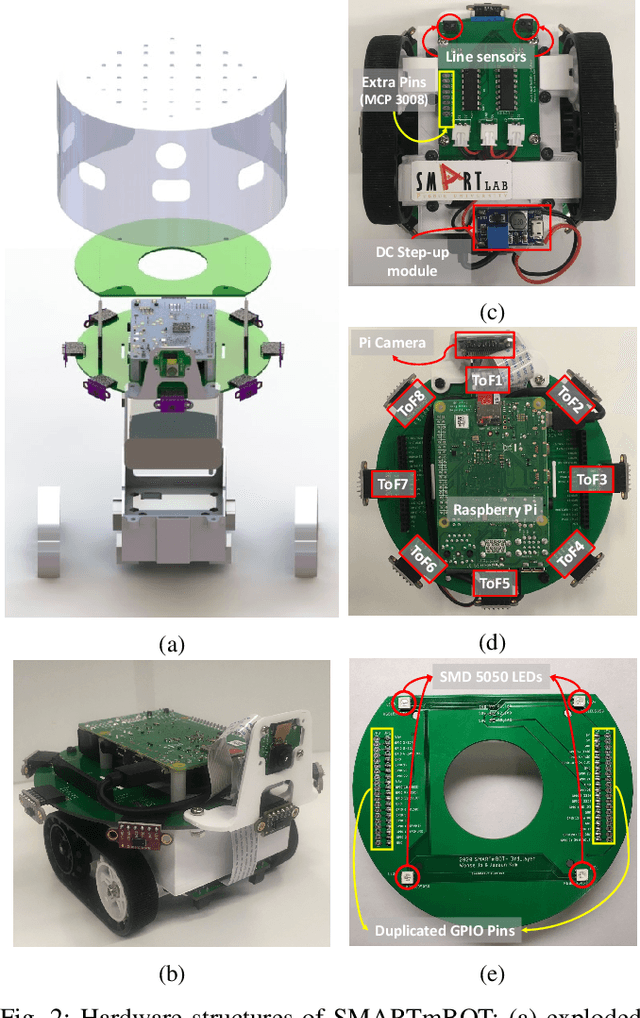
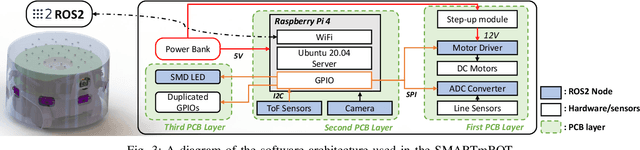
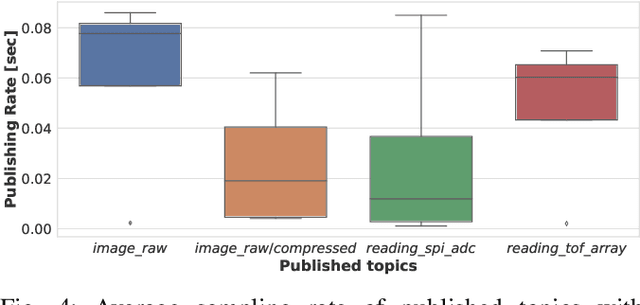
This paper introduces SMARTmBOT, an open-source mobile robot platform based on Robot Operating System 2 (ROS2). The characteristics of the SMARTmBOT, including low-cost, modular-typed, customizable and expandable design, make it an easily achievable and effective robot platform to support broad robotics research and education involving either single-robot or multi-robot systems. The total cost per robot is approximately $210, and most hardware components can be fabricated by a generic 3D printer, hence allowing users to build the robots or replace any broken parts conveniently. The SMARTmBot is also equipped with a rich range of sensors, making it competent for general task scenarios, such as point-to-point navigation and obstacle avoidance. We validated the mobility and function of SMARTmBOT through various robot navigation experiments and applications with tasks including go-to-goal, pure-pursuit, line following, and swarming. All source code necessary for reading sensors, streaming from an embedded camera, and controlling the robot including robot navigation controllers is available through an online repository that can be found at https://github.com/SMARTlab-Purdue/SMARTmBOT.