 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust and Precise Vehicle Localization based on Multi-sensor Fusion in Diverse City Scenes
Nov 15, 2017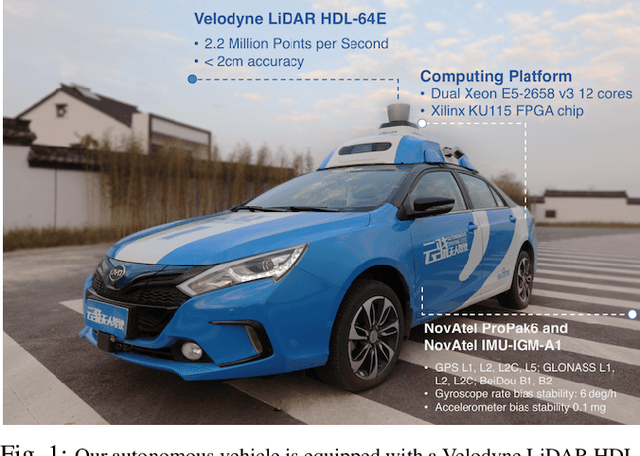
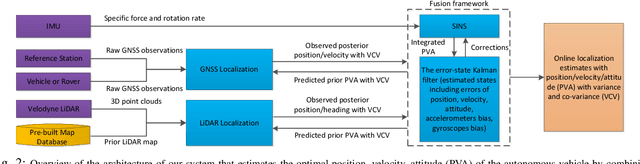
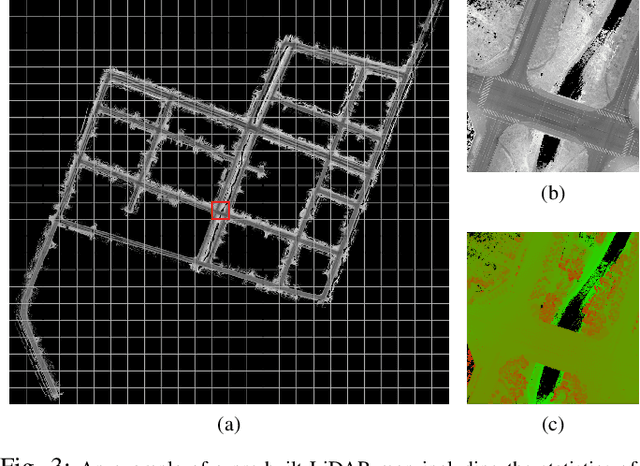
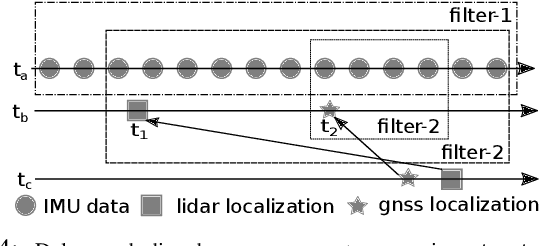
We present a robust and precise localization system that achieves centimeter-level localization accuracy in disparate city scenes. Our system adaptively uses information from complementary sensors such as GNSS, LiDAR, and IMU to achieve high localization accuracy and resilience in challenging scenes, such as urban downtown, highways, and tunnels. Rather than relying only on LiDAR intensity or 3D geometry, we make innovative use of LiDAR intensity and altitude cues to significantly improve localization system accuracy and robustness. Our GNSS RTK module utilizes the help of the multi-sensor fusion framework and achieves a better ambiguity resolution success rate. An error-state Kalman filter is applied to fuse the localization measurements from different sources with novel uncertainty estimation. We validate, in detail, the effectiveness of our approaches, achieving 5-10cm RMS accuracy and outperforming previous state-of-the-art systems. Importantly, our system, while deployed in a large autonomous driving fleet, made our vehicles fully autonomous in crowded city streets despite road construction that occurred from time to time. A dataset including more than 60 km real traffic driving in various urban roads is used to comprehensively test our system.