 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInstrumentation for Imitation Learning: Enhancing Training Datasets for Clothes Hanger Insertion
May 22, 2026Large behaviour models have transformed the field of robotic manipulation, but prohibitive data requirements have thus far prevented a revolution similar to vision language models. We believe that instrumentation, i.e. sensor integration in objects, can provide invaluable state information and enable efficient learning for robotic manipulation. In this paper, we present instrumented imitation learning of clothes hanger insertion. Using 180 teleoperated demonstrations, we train diffusion policies with and without access to instrumentation data. Results show that policies leveraging instrumentation outperform vision-only counterparts by 14-25 %pt and exhibit greater task awareness. Crucially, a black-box imitation learning policy learns to prioritise instrumentation signals without explicit guidance. In addition, enhancing the teleoperation dataset with rollouts from an instrumented expert policy, enables a vision-only student policy to achieve performance comparable to the instrumented expert, thereby surpassing the original vision-only policy. These findings establish instrumentation as a promising strategy to enhance imitation learning for robotic manipulation. Datasets are available on Zenodo.
You're Pushing My Buttons: Instrumented Learning of Gentle Button Presses
Apr 07, 2026Learning contact-rich manipulation is difficult from cameras and proprioception alone because contact events are only partially observed. We test whether training-time instrumentation, i.e., object sensorisation, can improve policy performance without creating deployment-time dependencies. Specifically, we study button pressing as a testbed and use a microphone fingertip to capture contact-relevant audio. We use an instrumented button-state signal as privileged supervision to fine-tune an audio encoder into a contact event detector. We combine the resulting representation with imitation learning using three strategies, such that the policy only uses vision and audio during inference. Button press success rates are similar across methods, but instrumentation-guided audio representations consistently reduce contact force. These results support instrumentation as a practical training-time auxiliary objective for learning contact-rich manipulation policies.
Instrumentation for Better Demonstrations: A Case Study
Apr 25, 2025Learning from demonstrations is a powerful paradigm for robot manipulation, but its effectiveness hinges on both the quantity and quality of the collected data. In this work, we present a case study of how instrumentation, i.e. integration of sensors, can improve the quality of demonstrations and automate data collection. We instrument a squeeze bottle with a pressure sensor to learn a liquid dispensing task, enabling automated data collection via a PI controller. Transformer-based policies trained on automated demonstrations outperform those trained on human data in 78% of cases. Our findings indicate that instrumentation not only facilitates scalable data collection but also leads to better-performing policies, highlighting its potential in the pursuit of generalist robotic agents.
Self-Mixing Laser Interferometry: In Search of an Ambient Noise-Resilient Alternative to Acoustic Sensing
Apr 18, 2025



Self-mixing interferometry (SMI) has been lauded for its sensitivity in detecting microvibrations, while requiring no physical contact with its target. Microvibrations, i.e., sounds, have recently been used as a salient indicator of extrinsic contact in robotic manipulation. In previous work, we presented a robotic fingertip using SMI for extrinsic contact sensing as an ambient-noise-resilient alternative to acoustic sensing. Here, we extend the validation experiments to the frequency domain. We find that for broadband ambient noise, SMI still outperforms acoustic sensing, but the difference is less pronounced than in time-domain analyses. For targeted noise disturbances, analogous to multiple robots simultaneously collecting data for the same task, SMI is still the clear winner. Lastly, we show how motor noise affects SMI sensing more so than acoustic sensing, and that a higher SMI readout frequency is important for future work. Design and data files are available at https://github.com/RemkoPr/icra2025-SMI-tactile-sensing.
Self-Mixing Laser Interferometry for Robotic Tactile Sensing
Feb 21, 2025



Self-mixing interferometry (SMI) has been lauded for its sensitivity in detecting microvibrations, while requiring no physical contact with its target. In robotics, microvibrations have traditionally been interpreted as a marker for object slip, and recently as a salient indicator of extrinsic contact. We present the first-ever robotic fingertip making use of SMI for slip and extrinsic contact sensing. The design is validated through measurement of controlled vibration sources, both before and after encasing the readout circuit in its fingertip package. Then, the SMI fingertip is compared to acoustic sensing through three experiments. The results are distilled into a technology decision map. SMI was found to be more sensitive to subtle slip events and significantly more robust against ambient noise. We conclude that the integration of SMI in robotic fingertips offers a new, promising branch of tactile sensing in robotics.
Conveying Emotions to Robots through Touch and Sound
Dec 04, 2024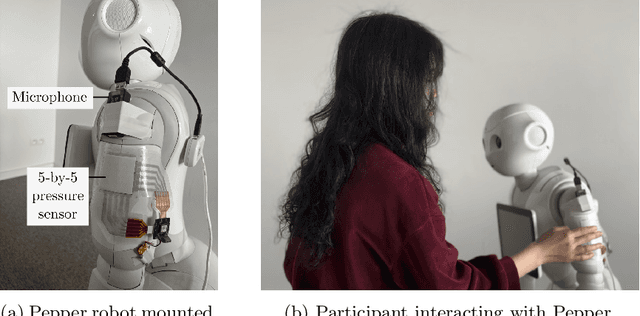



Human emotions can be conveyed through nuanced touch gestures. However, there is a lack of understanding of how consistently emotions can be conveyed to robots through touch. This study explores the consistency of touch-based emotional expression toward a robot by integrating tactile and auditory sensory reading of affective haptic expressions. We developed a piezoresistive pressure sensor and used a microphone to mimic touch and sound channels, respectively. In a study with 28 participants, each conveyed 10 emotions to a robot using spontaneous touch gestures. Our findings reveal a statistically significant consistency in emotion expression among participants. However, some emotions obtained low intraclass correlation values. Additionally, certain emotions with similar levels of arousal or valence did not exhibit significant differences in the way they were conveyed. We subsequently constructed a multi-modal integrating touch and audio features to decode the 10 emotions. A support vector machine (SVM) model demonstrated the highest accuracy, achieving 40% for 10 classes, with "Attention" being the most accurately conveyed emotion at a balanced accuracy of 87.65%.
Automatic Calibration for an Open-source Magnetic Tactile Sensor
May 28, 2024



Tactile sensing can enable robots to perform complex, contact-rich tasks. Magnetic sensors offer accurate three-axis force measurements while using affordable materials. Calibrating such a sensor involves either manual data collection, or automated procedures with precise mounting of the sensor relative to an actuator. We present an open-source magnetic tactile sensor with an automatic, in situ, gripper-agnostic calibration method, after which the sensor is immediately ready for use. Our goal is to lower the barrier to entry for tactile sensing, fostering collaboration in robotics. Design files and readout code can be found at https://github.com/LowiekVDS/Open-source-Magnetic-Tactile-Sensor}{https://github.com/LowiekVDS/Open-source-Magnetic-Tactile-Sensor.
Seamless Integration of Tactile Sensors for Cobots
Sep 11, 2023The development of tactile sensing is expected to enhance robotic systems in handling complex objects like deformables or reflective materials. However, readily available industrial grippers generally lack tactile feedback, which has led researchers to develop their own tactile sensors, resulting in a wide range of sensor hardware. Reading data from these sensors poses an integration challenge: either external wires must be routed along the robotic arm, or a wireless processing unit has to be fixed to the robot, increasing its size. We have developed a microcontroller-based sensor readout solution that seamlessly integrates with Robotiq grippers. Our Arduino compatible design takes away a major part of the integration complexity of tactile sensors and can serve as a valuable accelerator of research in the field. Design files and installation instructions can be found at https://github.com/RemkoPr/airo-halberd.
Augmenting Off-the-Shelf Grippers with Tactile Sensing
Jun 09, 2023



The development of tactile sensing and its fusion with computer vision is expected to enhance robotic systems in handling complex tasks like deformable object manipulation. However, readily available industrial grippers typically lack tactile feedback, which has led researchers to develop and integrate their own tactile sensors. This has resulted in a wide range of sensor hardware, making it difficult to compare performance between different systems. We highlight the value of accessible open-source sensors and present a set of fingertips specifically designed for fine object manipulation, with readily interpretable data outputs. The fingertips are validated through two difficult tasks: cloth edge tracing and cable tracing. Videos of these demonstrations, as well as design files and readout code can be found at https://github.com/RemkoPr/icra-2023-workshop-tactile-fingertips.