 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe P$^3$ dataset: Pixels, Points and Polygons for Multimodal Building Vectorization
May 21, 2025



We present the P$^3$ dataset, a large-scale multimodal benchmark for building vectorization, constructed from aerial LiDAR point clouds, high-resolution aerial imagery, and vectorized 2D building outlines, collected across three continents. The dataset contains over 10 billion LiDAR points with decimeter-level accuracy and RGB images at a ground sampling distance of 25 centimeter. While many existing datasets primarily focus on the image modality, P$^3$ offers a complementary perspective by also incorporating dense 3D information. We demonstrate that LiDAR point clouds serve as a robust modality for predicting building polygons, both in hybrid and end-to-end learning frameworks. Moreover, fusing aerial LiDAR and imagery further improves accuracy and geometric quality of predicted polygons. The P$^3$ dataset is publicly available, along with code and pretrained weights of three state-of-the-art models for building polygon prediction at https://github.com/raphaelsulzer/PixelsPointsPolygons .
Concise Plane Arrangements for Low-Poly Surface and Volume Modelling
Apr 09, 2024Plane arrangements are a useful tool for surface and volume modelling. However, their main drawback is poor scalability. We introduce two key novelties that enable the construction of plane arrangements for complex objects and entire scenes: an ordering scheme for the plane insertion and the direct use of input points during arrangement construction. Both ingredients reduce the number of unwanted splits, resulting in improved scalability of the construction mechanism by up to two orders of magnitude compared to existing algorithms. We further introduce a remeshing and simplification technique that allows us to extract low-polygon surface meshes and lightweight convex decompositions of volumes from the arrangement. We show that our approach leads to state-of-the-art results for the aforementioned tasks by comparing it to learning-based and traditional approaches on various different datasets. Our implementation is available at https://github.com/raphaelsulzer/compod .
A Survey and Benchmark of Automatic Surface Reconstruction from Point Clouds
Jan 31, 2023We survey and benchmark traditional and novel learning-based algorithms that address the problem of surface reconstruction from point clouds. Surface reconstruction from point clouds is particularly challenging when applied to real-world acquisitions, due to noise, outliers, non-uniform sampling and missing data. Traditionally, different handcrafted priors of the input points or the output surface have been proposed to make the problem more tractable. However, hyperparameter tuning for adjusting priors to different acquisition defects can be a tedious task. To this end, the deep learning community has recently addressed the surface reconstruction problem. In contrast to traditional approaches, deep surface reconstruction methods can learn priors directly from a training set of point clouds and corresponding true surfaces. In our survey, we detail how different handcrafted and learned priors affect the robustness of methods to defect-laden input and their capability to generate geometric and topologically accurate reconstructions. In our benchmark, we evaluate the reconstructions of several traditional and learning-based methods on the same grounds. We show that learning-based methods can generalize to unseen shape categories, but their training and test sets must share the same point cloud characteristics. We also provide the code and data to compete in our benchmark and to further stimulate the development of learning-based surface reconstruction https://github.com/raphaelsulzer/dsr-benchmark.
Deep Surface Reconstruction from Point Clouds with Visibility Information
Feb 03, 2022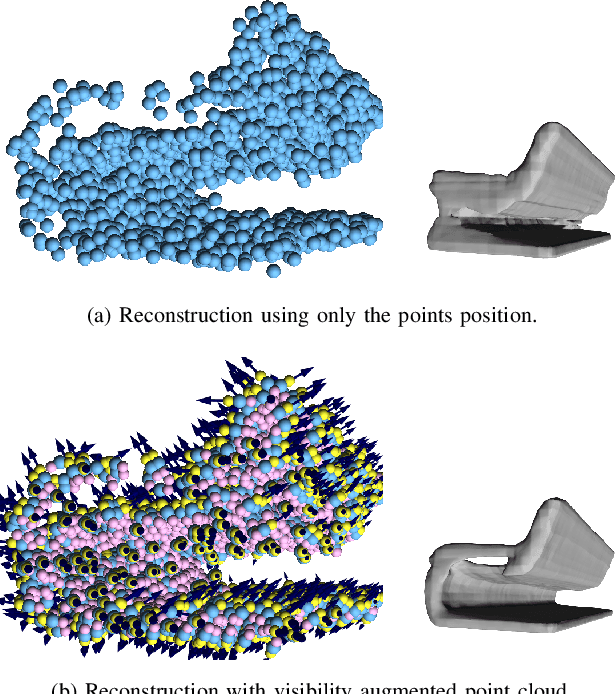
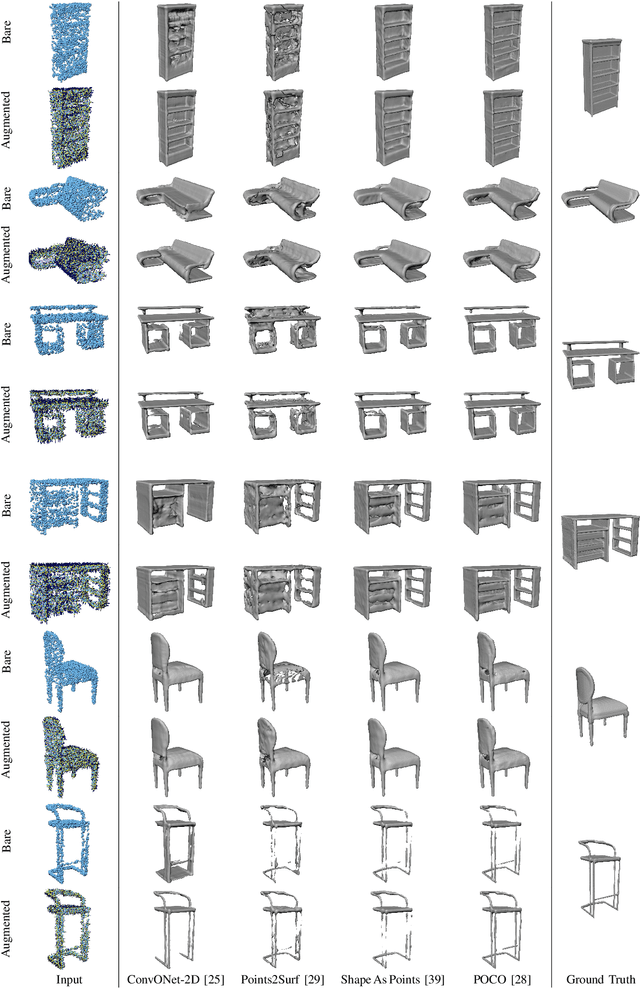
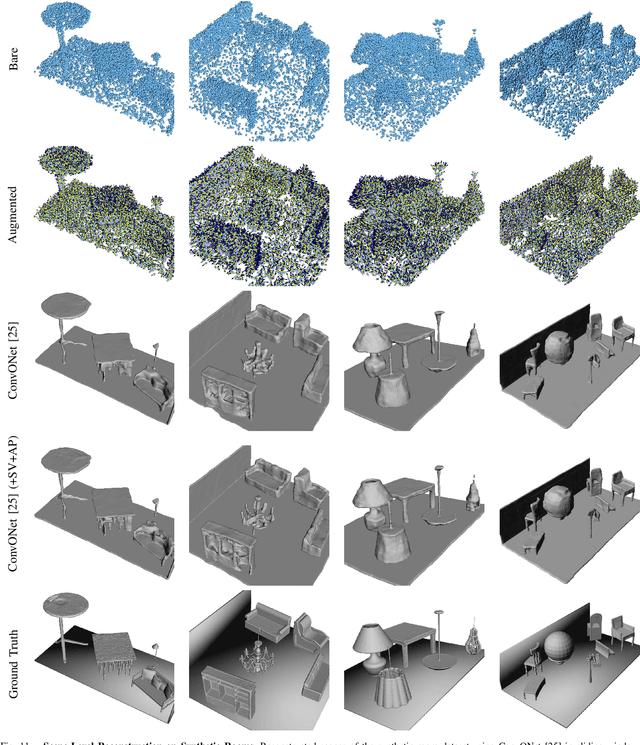
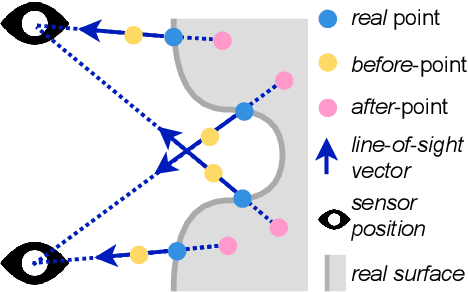
Most current neural networks for reconstructing surfaces from point clouds ignore sensor poses and only operate on raw point locations. Sensor visibility, however, holds meaningful information regarding space occupancy and surface orientation. In this paper, we present two simple ways to augment raw point clouds with visibility information, so it can directly be leveraged by surface reconstruction networks with minimal adaptation. Our proposed modifications consistently improve the accuracy of generated surfaces as well as the generalization ability of the networks to unseen shape domains. Our code and data is available at https://github.com/raphaelsulzer/dsrv-data.
Scalable Surface Reconstruction with Delaunay-Graph Neural Networks
Jul 15, 2021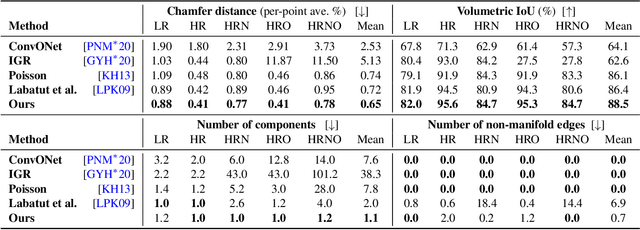
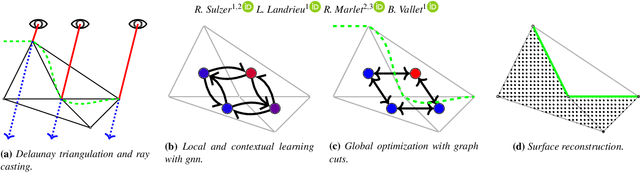
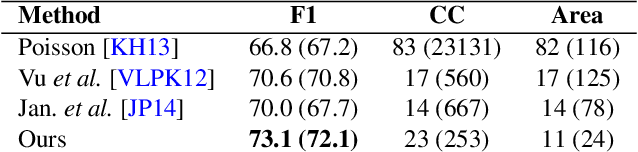
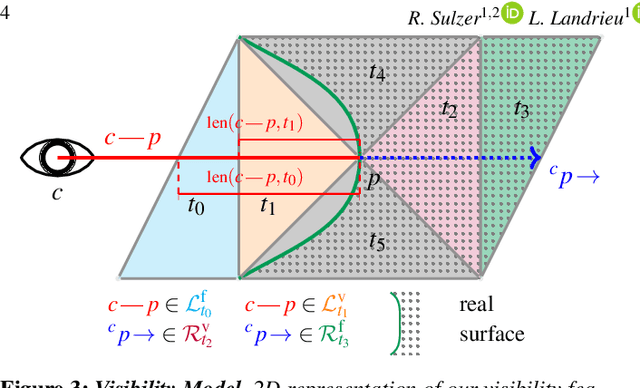
We introduce a novel learning-based, visibility-aware, surface reconstruction method for large-scale, defect-laden point clouds. Our approach can cope with the scale and variety of point cloud defects encountered in real-life Multi-View Stereo (MVS) acquisitions. Our method relies on a 3D Delaunay tetrahedralization whose cells are classified as inside or outside the surface by a graph neural network and an energy model solvable with a graph cut. Our model, making use of both local geometric attributes and line-of-sight visibility information, is able to learn a visibility model from a small amount of synthetic training data and generalizes to real-life acquisitions. Combining the efficiency of deep learning methods and the scalability of energy based models, our approach outperforms both learning and non learning-based reconstruction algorithms on two publicly available reconstruction benchmarks.
* The presentation of this work at SGP 2021 is available at https://youtu.be/KIrCDGhS10o