 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe P$^3$ dataset: Pixels, Points and Polygons for Multimodal Building Vectorization
May 21, 2025We present the P$^3$ dataset, a large-scale multimodal benchmark for building vectorization, constructed from aerial LiDAR point clouds, high-resolution aerial imagery, and vectorized 2D building outlines, collected across three continents. The dataset contains over 10 billion LiDAR points with decimeter-level accuracy and RGB images at a ground sampling distance of 25 centimeter. While many existing datasets primarily focus on the image modality, P$^3$ offers a complementary perspective by also incorporating dense 3D information. We demonstrate that LiDAR point clouds serve as a robust modality for predicting building polygons, both in hybrid and end-to-end learning frameworks. Moreover, fusing aerial LiDAR and imagery further improves accuracy and geometric quality of predicted polygons. The P$^3$ dataset is publicly available, along with code and pretrained weights of three state-of-the-art models for building polygon prediction at https://github.com/raphaelsulzer/PixelsPointsPolygons .
Concise Plane Arrangements for Low-Poly Surface and Volume Modelling
Apr 09, 2024Plane arrangements are a useful tool for surface and volume modelling. However, their main drawback is poor scalability. We introduce two key novelties that enable the construction of plane arrangements for complex objects and entire scenes: an ordering scheme for the plane insertion and the direct use of input points during arrangement construction. Both ingredients reduce the number of unwanted splits, resulting in improved scalability of the construction mechanism by up to two orders of magnitude compared to existing algorithms. We further introduce a remeshing and simplification technique that allows us to extract low-polygon surface meshes and lightweight convex decompositions of volumes from the arrangement. We show that our approach leads to state-of-the-art results for the aforementioned tasks by comparing it to learning-based and traditional approaches on various different datasets. Our implementation is available at https://github.com/raphaelsulzer/compod .
3D detection of roof sections from a single satellite image and application to LOD2-building reconstruction
Jul 11, 2023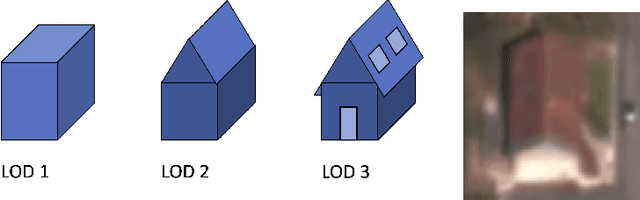
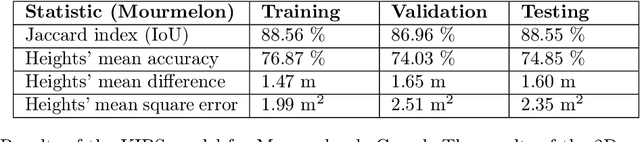
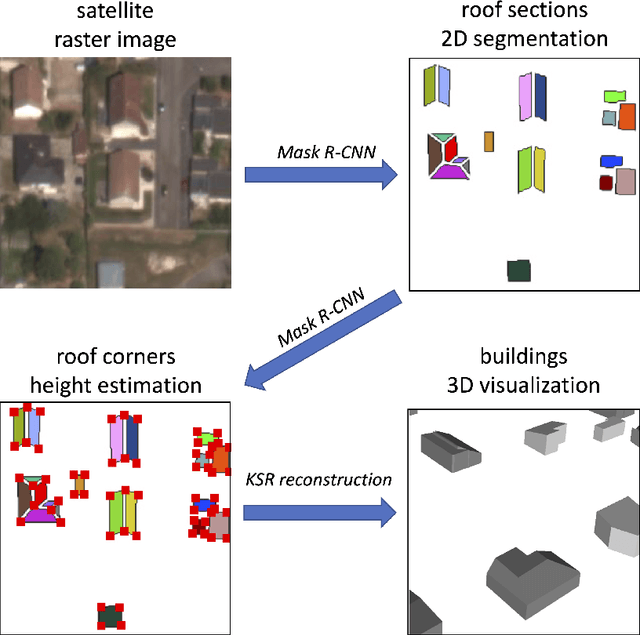

Reconstructing urban areas in 3D out of satellite raster images has been a long-standing and challenging goal of both academical and industrial research. The rare methods today achieving this objective at a Level Of Details $2$ rely on procedural approaches based on geometry, and need stereo images and/or LIDAR data as input. We here propose a method for urban 3D reconstruction named KIBS(\textit{Keypoints Inference By Segmentation}), which comprises two novel features: i) a full deep learning approach for the 3D detection of the roof sections, and ii) only one single (non-orthogonal) satellite raster image as model input. This is achieved in two steps: i) by a Mask R-CNN model performing a 2D segmentation of the buildings' roof sections, and after blending these latter segmented pixels within the RGB satellite raster image, ii) by another identical Mask R-CNN model inferring the heights-to-ground of the roof sections' corners via panoptic segmentation, unto full 3D reconstruction of the buildings and city. We demonstrate the potential of the KIBS method by reconstructing different urban areas in a few minutes, with a Jaccard index for the 2D segmentation of individual roof sections of $88.55\%$ and $75.21\%$ on our two data sets resp., and a height's mean error of such correctly segmented pixels for the 3D reconstruction of $1.60$ m and $2.06$ m on our two data sets resp., hence within the LOD2 precision range.
SCR: Smooth Contour Regression with Geometric Priors
Feb 08, 2022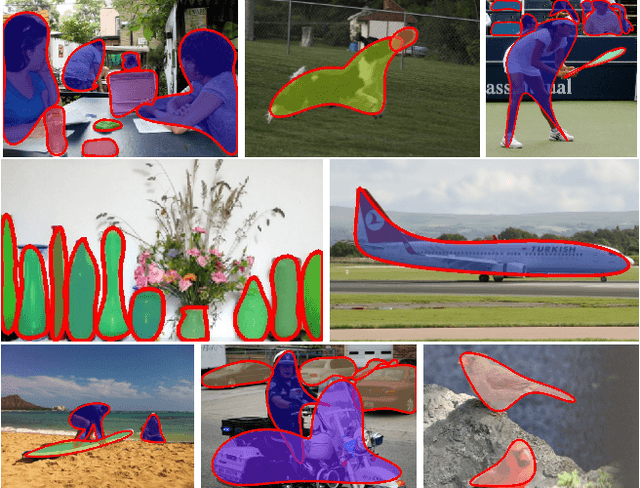
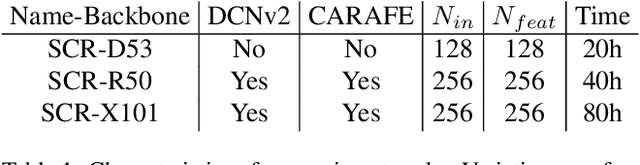
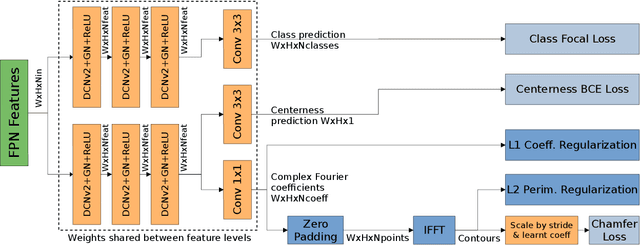

While object detection methods traditionally make use of pixel-level masks or bounding boxes, alternative representations such as polygons or active contours have recently emerged. Among them, methods based on the regression of Fourier or Chebyshev coefficients have shown high potential on freeform objects. By defining object shapes as polar functions, they are however limited to star-shaped domains. We address this issue with SCR: a method that captures resolution-free object contours as complex periodic functions. The method offers a good compromise between accuracy and compactness thanks to the design of efficient geometric shape priors. We benchmark SCR on the popular COCO 2017 instance segmentation dataset, and show its competitiveness against existing algorithms in the field. In addition, we design a compact version of our network, which we benchmark on embedded hardware with a wide range of power targets, achieving up to real-time performance.
Road Extraction from Overhead Images with Graph Neural Networks
Dec 09, 2021
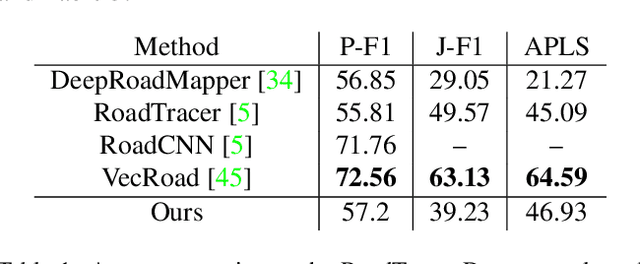
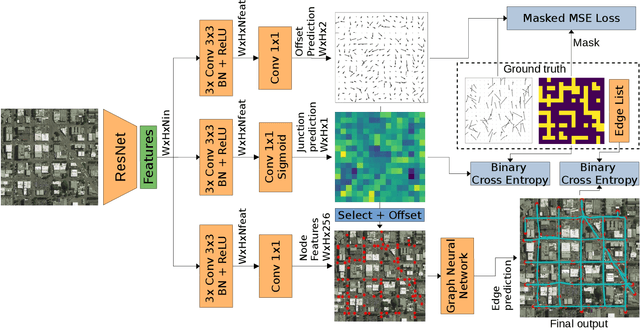

Automatic road graph extraction from aerial and satellite images is a long-standing challenge. Existing algorithms are either based on pixel-level segmentation followed by vectorization, or on iterative graph construction using next move prediction. Both of these strategies suffer from severe drawbacks, in particular high computing resources and incomplete outputs. By contrast, we propose a method that directly infers the final road graph in a single pass. The key idea consists in combining a Fully Convolutional Network in charge of locating points of interest such as intersections, dead ends and turns, and a Graph Neural Network which predicts links between these points. Such a strategy is more efficient than iterative methods and allows us to streamline the training process by removing the need for generation of starting locations while keeping the training end-to-end. We evaluate our method against existing works on the popular RoadTracer dataset and achieve competitive results. We also benchmark the speed of our method and show that it outperforms existing approaches. This opens the possibility of in-flight processing on embedded devices.