 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenignity of loss landscape with weight decay requires both large overparametrization and initialization
May 28, 2025The optimization of neural networks under weight decay remains poorly understood from a theoretical standpoint. While weight decay is standard practice in modern training procedures, most theoretical analyses focus on unregularized settings. In this work, we investigate the loss landscape of the $\ell_2$-regularized training loss for two-layer ReLU networks. We show that the landscape becomes benign -- i.e., free of spurious local minima -- under large overparametrization, specifically when the network width $m$ satisfies $m \gtrsim \min(n^d, 2^n)$, where $n$ is the number of data points and $d$ the input dimension. More precisely in this regime, almost all constant activation regions contain a global minimum and no spurious local minima. We further show that this level of overparametrization is not only sufficient but also necessary via the example of orthogonal data. Finally, we demonstrate that such loss landscape results primarily hold relevance in the large initialization regime. In contrast, for small initializations -- corresponding to the feature learning regime -- optimization can still converge to spurious local minima, despite the global benignity of the landscape.
Learning a Neuron by a Shallow ReLU Network: Dynamics and Implicit Bias for Correlated Inputs
Jun 10, 2023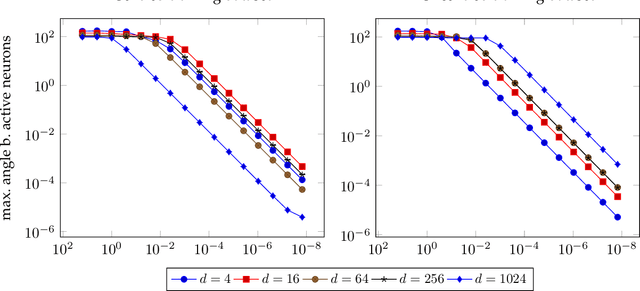



We prove that, for the fundamental regression task of learning a single neuron, training a one-hidden layer ReLU network of any width by gradient flow from a small initialisation converges to zero loss and is implicitly biased to minimise the rank of network parameters. By assuming that the training points are correlated with the teacher neuron, we complement previous work that considered orthogonal datasets. Our results are based on a detailed non-asymptotic analysis of the dynamics of each hidden neuron throughout the training. We also show and characterise a surprising distinction in this setting between interpolator networks of minimal rank and those of minimal Euclidean norm. Finally we perform a range of numerical experiments, which corroborate our theoretical findings.
Adversarial Reprogramming Revisited
Jun 07, 2022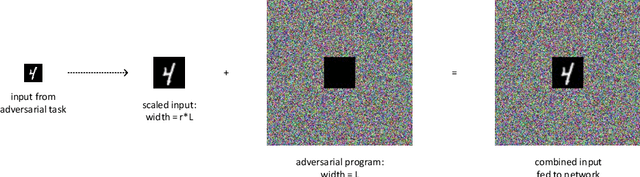
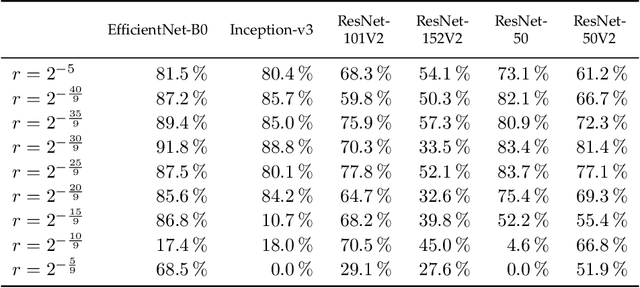
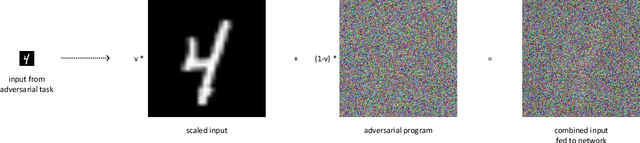

Adversarial reprogramming, introduced by Elsayed, Goodfellow, and Sohl-Dickstein, seeks to repurpose a neural network to perform a different task, by manipulating its input without modifying its weights. We prove that two-layer ReLU neural networks with random weights can be adversarially reprogrammed to achieve arbitrarily high accuracy on Bernoulli data models over hypercube vertices, provided the network width is no greater than its input dimension. We also substantially strengthen a recent result of Phuong and Lampert on directional convergence of gradient flow, and obtain as a corollary that training two-layer ReLU neural networks on orthogonally separable datasets can cause their adversarial reprogramming to fail. We support these theoretical results by experiments that demonstrate that, as long as batch normalisation layers are suitably initialised, even untrained networks with random weights are susceptible to adversarial reprogramming. This is in contrast to observations in several recent works that suggested that adversarial reprogramming is not possible for untrained networks to any degree of reliability.
Human-like Relational Models for Activity Recognition in Video
Jul 12, 2021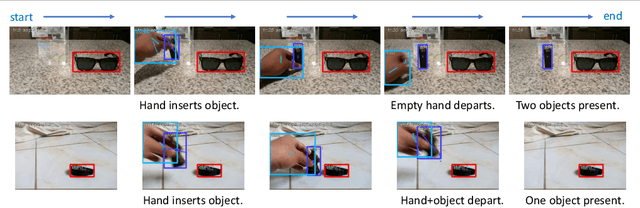
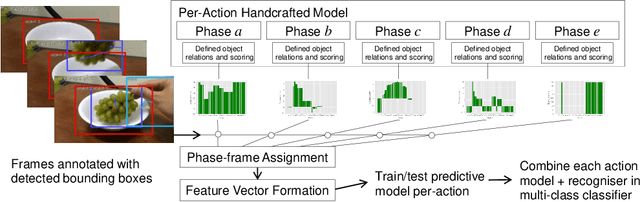
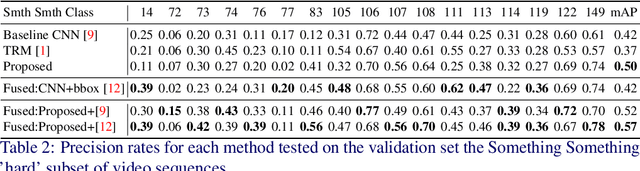
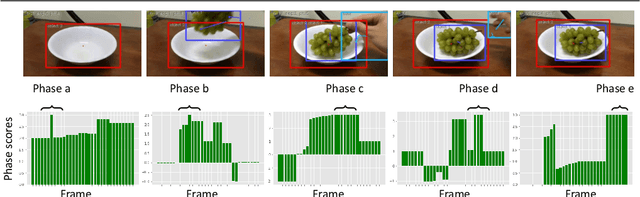
Video activity recognition by deep neural networks is impressive for many classes. However, it falls short of human performance, especially for challenging to discriminate activities. Humans differentiate these complex activities by recognising critical spatio-temporal relations among explicitly recognised objects and parts, for example, an object entering the aperture of a container. Deep neural networks can struggle to learn such critical relationships effectively. Therefore we propose a more human-like approach to activity recognition, which interprets a video in sequential temporal phases and extracts specific relationships among objects and hands in those phases. Random forest classifiers are learnt from these extracted relationships. We apply the method to a challenging subset of the something-something dataset and achieve a more robust performance against neural network baselines on challenging activities.