 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysically-admissible polarimetric data augmentation for road-scene analysis
Jun 15, 2022
Polarimetric imaging, along with deep learning, has shown improved performances on different tasks including scene analysis. However, its robustness may be questioned because of the small size of the training datasets. Though the issue could be solved by data augmentation, polarization modalities are subject to physical feasibility constraints unaddressed by classical data augmentation techniques. To address this issue, we propose to use CycleGAN, an image translation technique based on deep generative models that solely relies on unpaired data, to transfer large labeled road scene datasets to the polarimetric domain. We design several auxiliary loss terms that, alongside the CycleGAN losses, deal with the physical constraints of polarimetric images. The efficiency of this solution is demonstrated on road scene object detection tasks where generated realistic polarimetric images allow to improve performances on cars and pedestrian detection up to 9%. The resulting constrained CycleGAN is publicly released, allowing anyone to generate their own polarimetric images.
Road scenes analysis in adverse weather conditions by polarization-encoded images and adapted deep learning
Oct 02, 2019
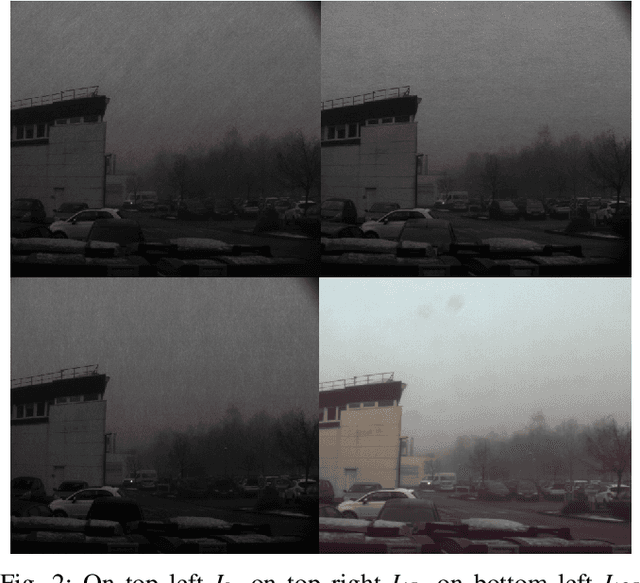
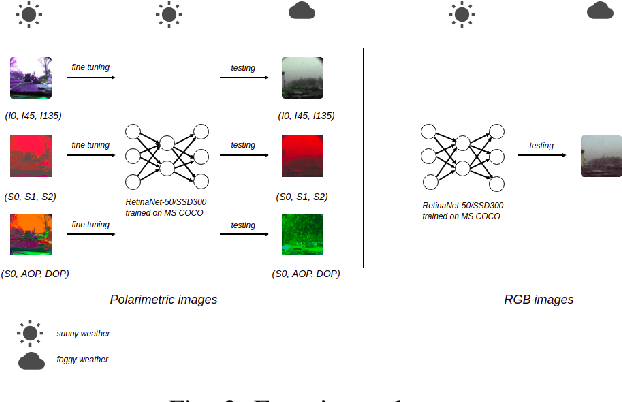
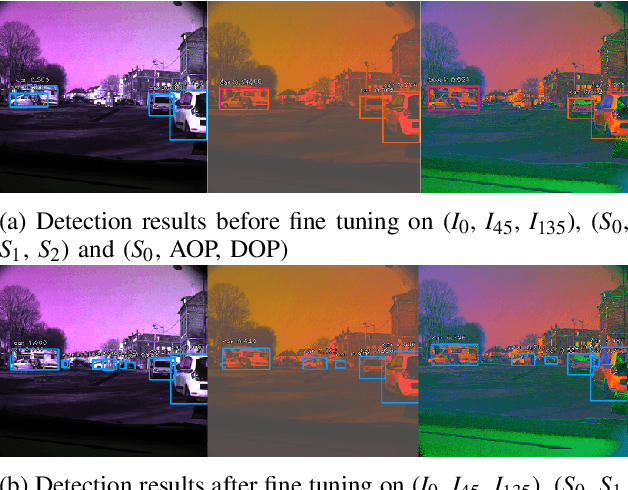
Object detection in road scenes is necessary to develop both autonomous vehicles and driving assistance systems. Even if deep neural networks for recognition task have shown great performances using conventional images, they fail to detect objects in road scenes in complex acquisition situations. In contrast, polarization images, characterizing the light wave, can robustly describe important physical properties of the object even under poor illumination or strong reflections. This paper shows how non-conventional polarimetric imaging modality overcomes the classical methods for object detection especially in adverse weather conditions. The efficiency of the proposed method is mostly due to the high power of the polarimetry to discriminate any object by its reflective properties and on the use of deep neural networks for object detection. Our goal by this work, is to prove that polarimetry brings a real added value compared with RGB images for object detection. Experimental results on our own dataset composed of road scene images taken during adverse weather conditions show that polarimetry together with deep learning can improve the state-of-the-art by about 20% to 50% on different detection tasks.