 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLogical Entity Representation in Knowledge-Graphs for Differentiable Rule Learning
May 22, 2023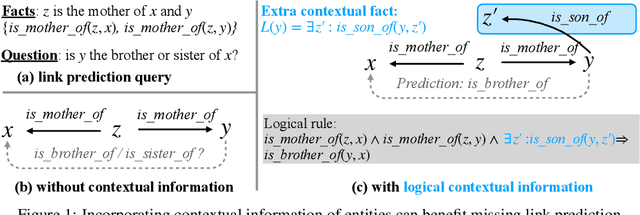
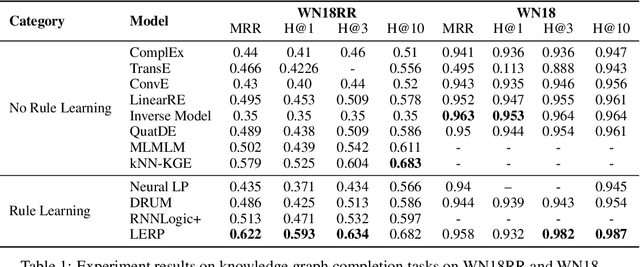
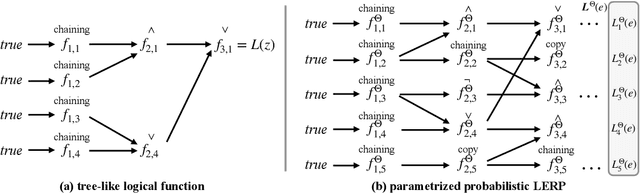
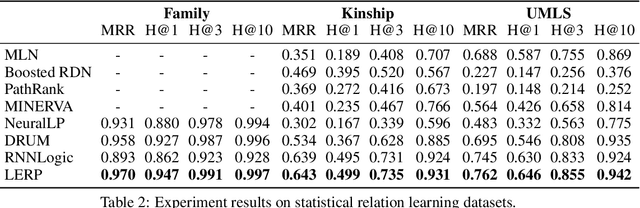
Probabilistic logical rule learning has shown great strength in logical rule mining and knowledge graph completion. It learns logical rules to predict missing edges by reasoning on existing edges in the knowledge graph. However, previous efforts have largely been limited to only modeling chain-like Horn clauses such as $R_1(x,z)\land R_2(z,y)\Rightarrow H(x,y)$. This formulation overlooks additional contextual information from neighboring sub-graphs of entity variables $x$, $y$ and $z$. Intuitively, there is a large gap here, as local sub-graphs have been found to provide important information for knowledge graph completion. Inspired by these observations, we propose Logical Entity RePresentation (LERP) to encode contextual information of entities in the knowledge graph. A LERP is designed as a vector of probabilistic logical functions on the entity's neighboring sub-graph. It is an interpretable representation while allowing for differentiable optimization. We can then incorporate LERP into probabilistic logical rule learning to learn more expressive rules. Empirical results demonstrate that with LERP, our model outperforms other rule learning methods in knowledge graph completion and is comparable or even superior to state-of-the-art black-box methods. Moreover, we find that our model can discover a more expressive family of logical rules. LERP can also be further combined with embedding learning methods like TransE to make it more interpretable.
SOT for MOT
Dec 04, 2017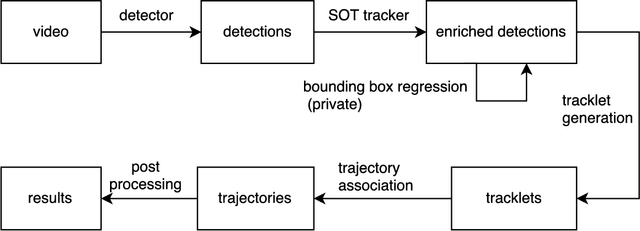


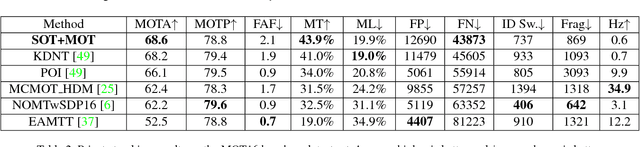
In this paper we present a robust tracker to solve the multiple object tracking (MOT) problem, under the framework of tracking-by-detection. As the first contribution, we innovatively combine single object tracking (SOT) algorithms with multiple object tracking algorithms, and our results show that SOT is a general way to strongly reduce the number of false negatives, regardless of the quality of detection. Another contribution is that we show with a deep learning based appearance model, it is easy to associate detections of the same object efficiently and also with high accuracy. This appearance model plays an important role in our MOT algorithm to correctly associate detections into long trajectories, and also in our SOT algorithm to discover new detections mistakenly missed by the detector. The deep neural network based model ensures the robustness of our tracking algorithm, which can perform data association in a wide variety of scenes. We ran comprehensive experiments on a large-scale and challenging dataset, the MOT16 benchmark, and results showed that our tracker achieved state-of-the-art performance based on both public and private detections.