 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMSSP : A Versatile Multi-Scenario Adaptable Intelligent Robot Simulation Platform Based on LIDAR-Inertial Fusion
Jul 19, 2024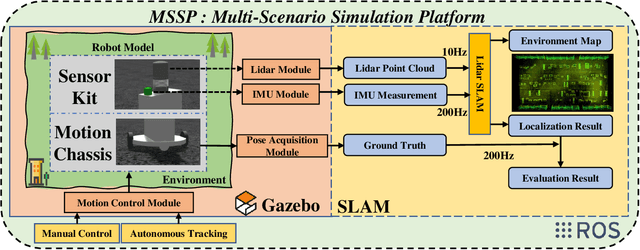
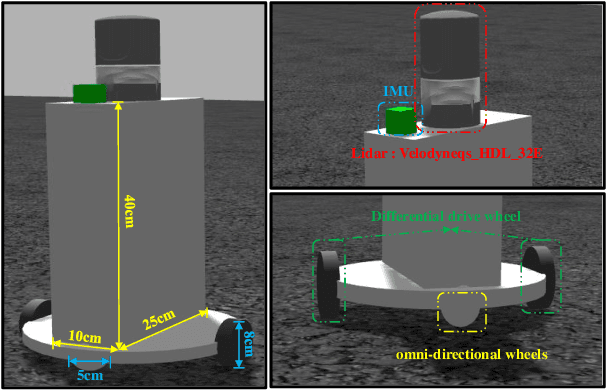
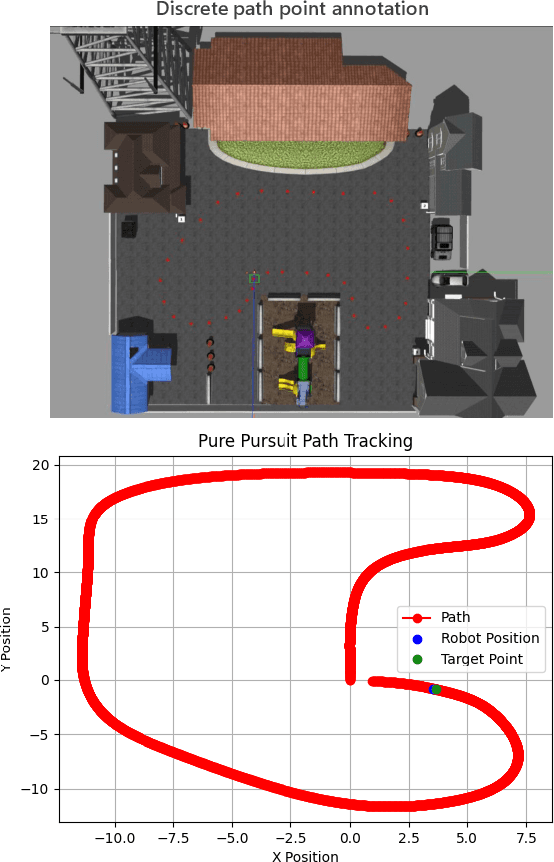
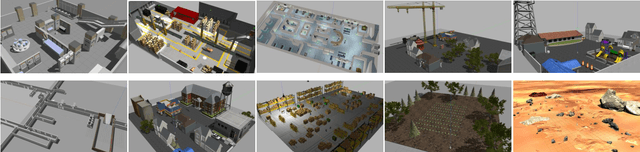
This letter presents a multi-scenario adaptable intelligent robot simulation platform based on LIDAR-inertial fusion, with three main features: (1 The platform includes an versatile robot model that can be freely controlled through manual control or autonomous tracking. This model is equipped with various types of LIDAR and Inertial Measurement Unit (IMU), providing ground truth information with absolute accuracy. (2 The platform provides a collection of simulation environments with diverse characteristic information and supports developers in customizing and modifying environments according to their needs. (3 The platform supports evaluation of localization performance for SLAM frameworks. Ground truth with absolute accuracy eliminates the inherent errors of global positioning sensors present in real experiments, facilitating detailed analysis and evaluation of the algorithms. By utilizing the simulation platform, developers can overcome the limitations of real environments and datasets, enabling fine-grained analysis and evaluation of mainstream SLAM algorithms in various environments. Experiments conducted in different environments and with different LIDARs demonstrate the wide applicability and practicality of our simulation platform. The implementation of the simulation platform is open-sourced on Github.
VoxelMap++: Mergeable Voxel Mapping Method for Online LiDAR(-inertial) Odometry
Aug 05, 2023



This paper presents VoxelMap++: a voxel mapping method with plane merging which can effectively improve the accuracy and efficiency of LiDAR(-inertial) based simultaneous localization and mapping (SLAM). This map is a collection of voxels that contains one plane feature with 3DOF representation and corresponding covariance estimation. Considering total map will contain a large number of coplanar features (kid planes), these kid planes' 3DOF estimation can be regarded as the measurements with covariance of a larger plane (father plane). Thus, we design a plane merging module based on union-find which can save resources and further improve the accuracy of plane fitting. This module can distinguish the kid planes in different voxels and merge these kid planes to estimate the father plane. After merging, the father plane 3DOF representation will be more accurate than the kids plane and the uncertainty will decrease significantly which can further improve the performance of LiDAR(-inertial) odometry. Experiments on challenging environments such as corridors and forests demonstrate the high accuracy and efficiency of our method compared to other state-of-the-art methods (see our attached video). By the way, our implementation VoxelMap++ is open-sourced on GitHub which is applicable for both non-repetitive scanning LiDARs and traditional scanning LiDAR.