 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMSSP : A Versatile Multi-Scenario Adaptable Intelligent Robot Simulation Platform Based on LIDAR-Inertial Fusion
Paper and Code
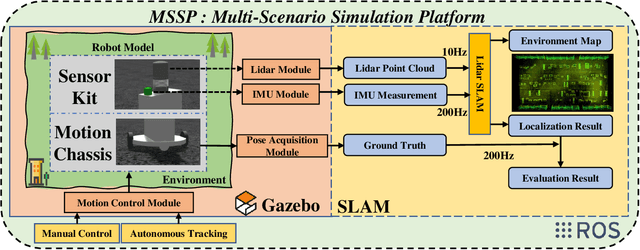
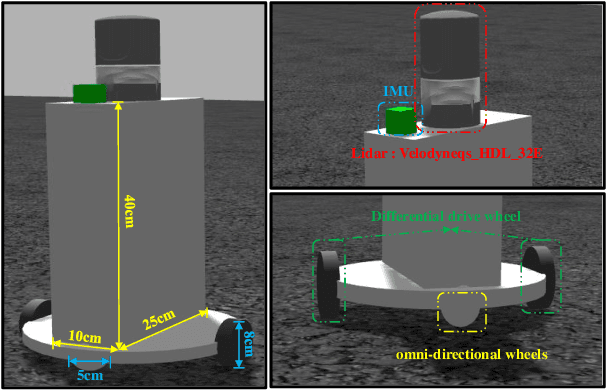
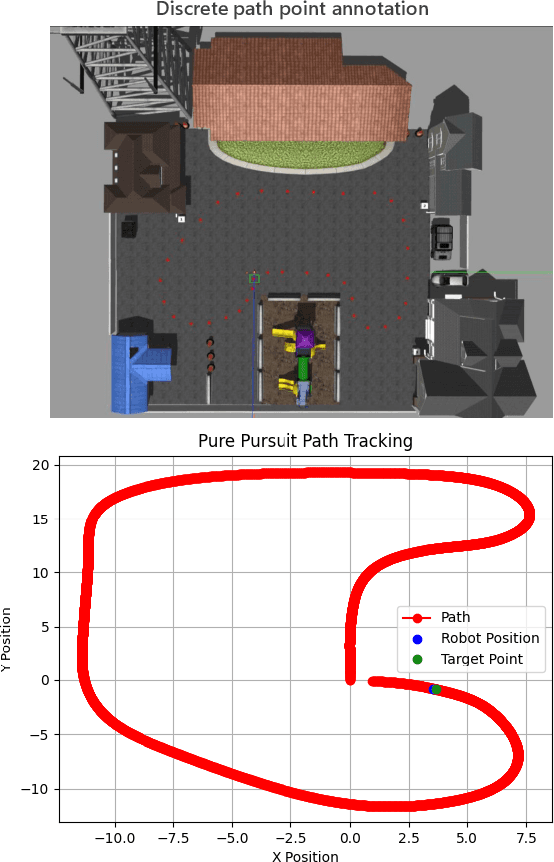
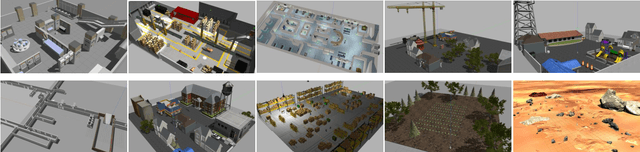
This letter presents a multi-scenario adaptable intelligent robot simulation platform based on LIDAR-inertial fusion, with three main features: (1 The platform includes an versatile robot model that can be freely controlled through manual control or autonomous tracking. This model is equipped with various types of LIDAR and Inertial Measurement Unit (IMU), providing ground truth information with absolute accuracy. (2 The platform provides a collection of simulation environments with diverse characteristic information and supports developers in customizing and modifying environments according to their needs. (3 The platform supports evaluation of localization performance for SLAM frameworks. Ground truth with absolute accuracy eliminates the inherent errors of global positioning sensors present in real experiments, facilitating detailed analysis and evaluation of the algorithms. By utilizing the simulation platform, developers can overcome the limitations of real environments and datasets, enabling fine-grained analysis and evaluation of mainstream SLAM algorithms in various environments. Experiments conducted in different environments and with different LIDARs demonstrate the wide applicability and practicality of our simulation platform. The implementation of the simulation platform is open-sourced on Github.