 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFilmComposer: LLM-Driven Music Production for Silent Film Clips
Mar 11, 2025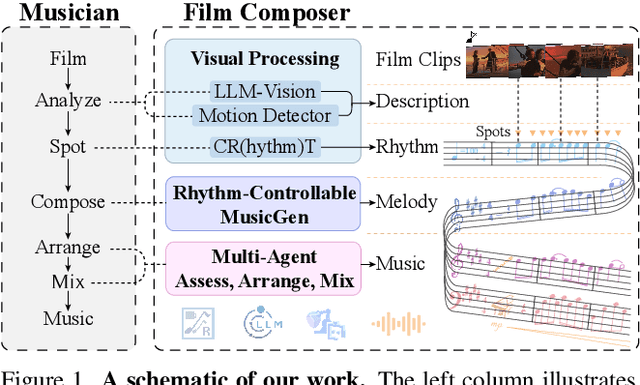
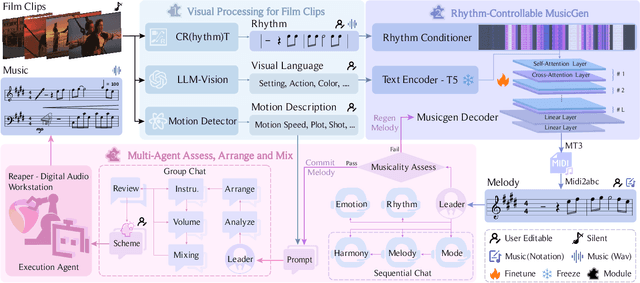
In this work, we implement music production for silent film clips using LLM-driven method. Given the strong professional demands of film music production, we propose the FilmComposer, simulating the actual workflows of professional musicians. FilmComposer is the first to combine large generative models with a multi-agent approach, leveraging the advantages of both waveform music and symbolic music generation. Additionally, FilmComposer is the first to focus on the three core elements of music production for film-audio quality, musicality, and musical development-and introduces various controls, such as rhythm, semantics, and visuals, to enhance these key aspects. Specifically, FilmComposer consists of the visual processing module, rhythm-controllable MusicGen, and multi-agent assessment, arrangement and mix. In addition, our framework can seamlessly integrate into the actual music production pipeline and allows user intervention in every step, providing strong interactivity and a high degree of creative freedom. Furthermore, we propose MusicPro-7k which includes 7,418 film clips, music, description, rhythm spots and main melody, considering the lack of a professional and high-quality film music dataset. Finally, both the standard metrics and the new specialized metrics we propose demonstrate that the music generated by our model achieves state-of-the-art performance in terms of quality, consistency with video, diversity, musicality, and musical development. Project page: https://apple-jun.github.io/FilmComposer.github.io/
Music Genre Classification: Ensemble Learning with Subcomponents-level Attention
Dec 20, 2024



Music Genre Classification is one of the most popular topics in the fields of Music Information Retrieval (MIR) and digital signal processing. Deep Learning has emerged as the top performer for classifying music genres among various methods. The letter introduces a novel approach by combining ensemble learning with attention to sub-components, aiming to enhance the accuracy of identifying music genres. The core innovation of our work is the proposal to classify the subcomponents of the music pieces separately, allowing our model to capture distinct characteristics from those sub components. By applying ensemble learning techniques to these individual classifications, we make the final classification decision on the genre of the music. The proposed method has superior advantages in terms of accuracy compared to the other state-of-the-art techniques trained and tested on the GTZAN dataset.
Soft Hindsight Experience Replay
Feb 06, 2020


Efficient learning in the environment with sparse rewards is one of the most important challenges in Deep Reinforcement Learning (DRL). In continuous DRL environments such as robotic arms control, Hindsight Experience Replay (HER) has been shown an effective solution. However, due to the brittleness of deterministic methods, HER and its variants typically suffer from a major challenge for stability and convergence, which significantly affects the final performance. This challenge severely limits the applicability of such methods to complex real-world domains. To tackle this challenge, in this paper, we propose Soft Hindsight Experience Replay (SHER), a novel approach based on HER and Maximum Entropy Reinforcement Learning (MERL), combining the failed experiences reuse and maximum entropy probabilistic inference model. We evaluate SHER on Open AI Robotic manipulation tasks with sparse rewards. Experimental results show that, in contrast to HER and its variants, our proposed SHER achieves state-of-the-art performance, especially in the difficult HandManipulation tasks. Furthermore, our SHER method is more stable, achieving very similar performance across different random seeds.