 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Fundamental Matrix Estimation without Correspondences
Oct 03, 2018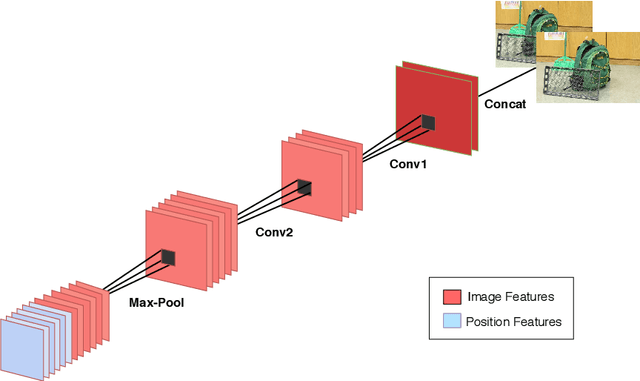
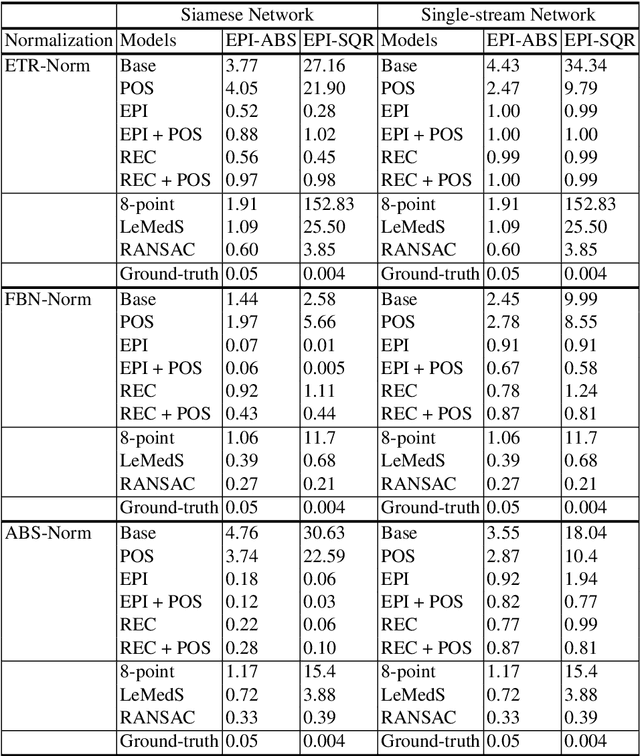
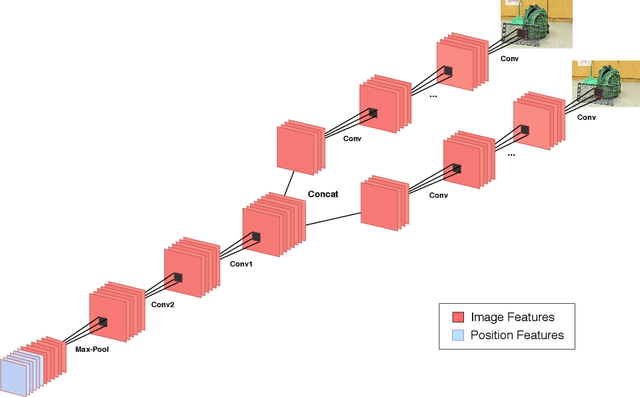
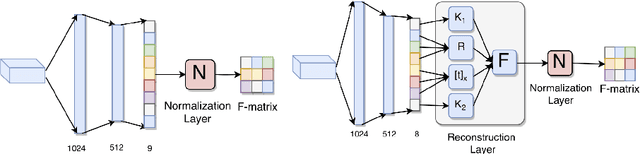
Estimating fundamental matrices is a classic problem in computer vision. Traditional methods rely heavily on the correctness of estimated key-point correspondences, which can be noisy and unreliable. As a result, it is difficult for these methods to handle image pairs with large occlusion or significantly different camera poses. In this paper, we propose novel neural network architectures to estimate fundamental matrices in an end-to-end manner without relying on point correspondences. New modules and layers are introduced in order to preserve mathematical properties of the fundamental matrix as a homogeneous rank-2 matrix with seven degrees of freedom. We analyze performance of the proposed models using various metrics on the KITTI dataset, and show that they achieve competitive performance with traditional methods without the need for extracting correspondences.