 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMCPDepth: Omnidirectional Depth Estimation via Stereo Matching from Multi-Cylindrical Panoramas
Aug 03, 2024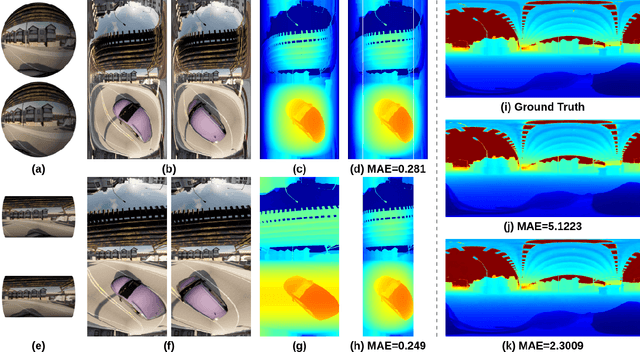
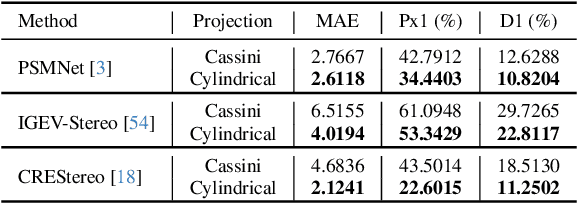
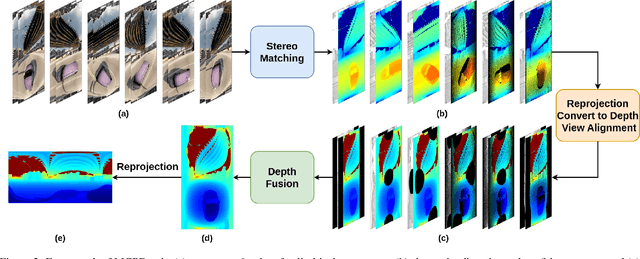
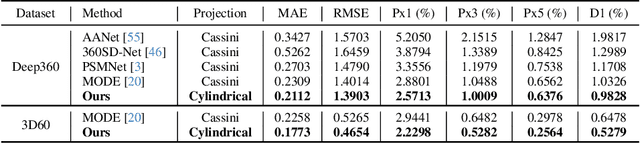
We introduce Multi-Cylindrical Panoramic Depth Estimation (MCPDepth), a two-stage framework for omnidirectional depth estimation via stereo matching between multiple cylindrical panoramas. MCPDepth uses cylindrical panoramas for initial stereo matching and then fuses the resulting depth maps across views. A circular attention module is employed to overcome the distortion along the vertical axis. MCPDepth exclusively utilizes standard network components, simplifying deployment to embedded devices and outperforming previous methods that require custom kernels. We theoretically and experimentally compare spherical and cylindrical projections for stereo matching, highlighting the advantages of the cylindrical projection. MCPDepth achieves state-of-the-art performance with an 18.8% reduction in mean absolute error (MAE) for depth on the outdoor synthetic dataset Deep360 and a 19.9% reduction on the indoor real-scene dataset 3D60.