 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAerial Manipulation Using Hybrid Force and Position NMPC Applied to Aerial Writing
Jun 03, 2020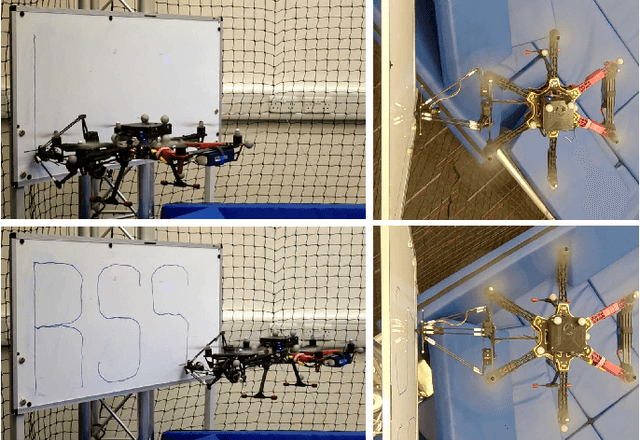

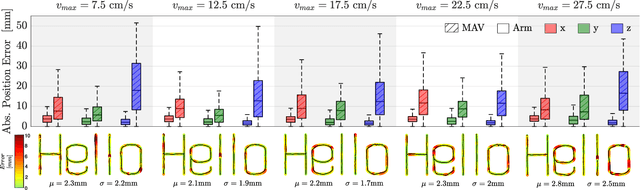
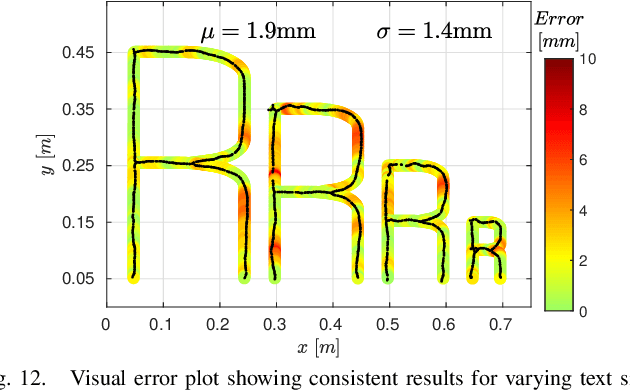
Aerial manipulation aims at combining the manoeuvrability of aerial vehicles with the manipulation capabilities of robotic arms. This, however, comes at the cost of the additional control complexity due to the coupling of the dynamics of the two systems. In this paper we present a NMPC specifically designed for MAVs equipped with a robotic arm. We formulate a hybrid control model for the combined MAV-arm system which incorporates interaction forces acting on the end effector. We explain the practical implementation of our algorithm and show extensive experimental results of our custom built system performing multiple aerial-writing tasks on a whiteboard, revealing accuracy in the order of millimetres.
Nonlinear MPC with Motor Failure Identification and Recovery for Safe and Aggressive Multicopter Flight
Feb 16, 2020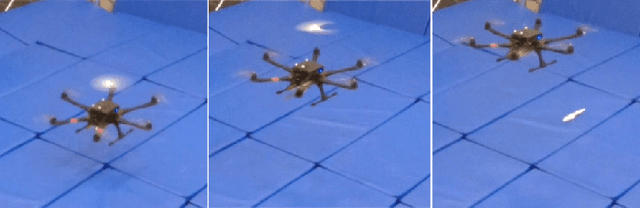
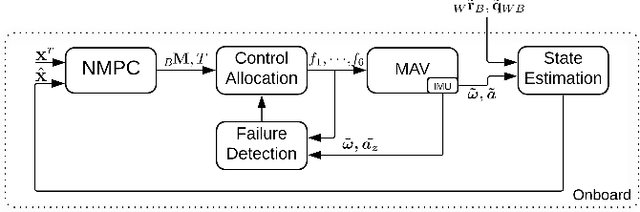
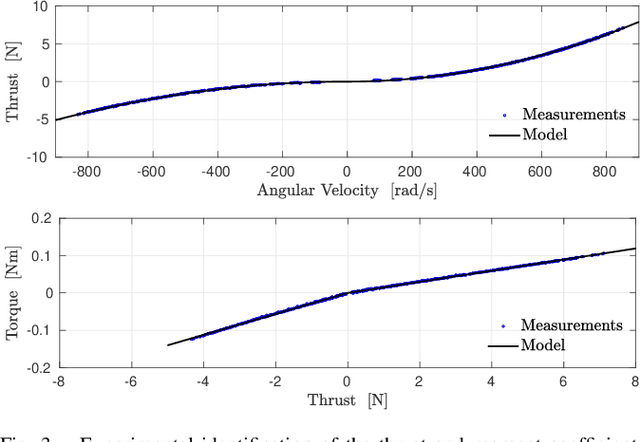
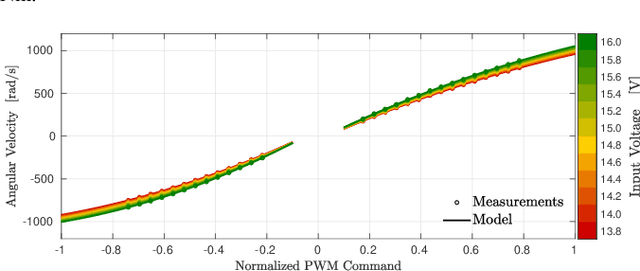
Safe and precise reference tracking is a crucial characteristic of MAVs that have to operate under the influence of external disturbances in cluttered environments. In this paper, we present a NMPC that exploits the fully physics based non-linear dynamics of the system. We furthermore show how the moment and thrust control inputs can be transformed into feasible actuator commands. In order to guarantee safe operation despite potential loss of a motor under which we show our system keeps operating safely, we developed an EKF based motor failure identification algorithm. We verify the effectiveness of the developed pipeline in flight experiments with and without motor failures.