Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinear MPC with Motor Failure Identification and Recovery for Safe and Aggressive Multicopter Flight
Paper and Code
Feb 16, 2020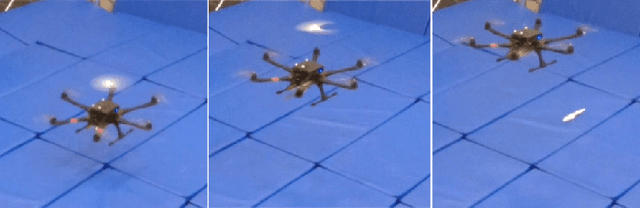
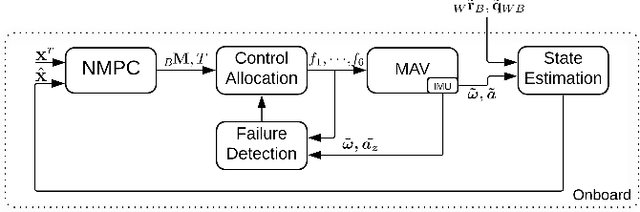
Safe and precise reference tracking is a crucial characteristic of MAVs that have to operate under the influence of external disturbances in cluttered environments. In this paper, we present a NMPC that exploits the fully physics based non-linear dynamics of the system. We furthermore show how the moment and thrust control inputs can be transformed into feasible actuator commands. In order to guarantee safe operation despite potential loss of a motor under which we show our system keeps operating safely, we developed an EKF based motor failure identification algorithm. We verify the effectiveness of the developed pipeline in flight experiments with and without motor failures.
* Accepted in the International Conference on Robotics and Automation
(ICRA) 2020. 7 (6 + 1) pages. Video link: https://youtu.be/cAQeSZ3tIqY
View paper on