 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA High-Fidelity Simulation Framework for Grasping Stability Analysis in Human Casualty Manipulation
Apr 04, 2024



Recently, there has been a growing interest in rescue robots due to their vital role in addressing emergency scenarios and providing crucial support in challenging or hazardous situations where human intervention is difficult. However, very few of these robots are capable of actively engaging with humans and undertaking physical manipulation tasks. This limitation is largely attributed to the absence of tools that can realistically simulate physical interactions, especially the contact mechanisms between a robotic gripper and a human body. In this letter, we aim to address key limitations in current developments towards robotic casualty manipulation. Firstly, we present an integrative simulation framework for casualty manipulation. We adapt a finite element method (FEM) tool into the grasping and manipulation scenario, and the developed framework can provide accurate biomechanical reactions resulting from manipulation. Secondly, we conduct a detailed assessment of grasping stability during casualty grasping and manipulation simulations. To validate the necessity and superior performance of the proposed high-fidelity simulation framework, we conducted a qualitative and quantitative comparison of grasping stability analyses between the proposed framework and the state-of-the-art multi-body physics simulations. Through these efforts, we have taken the first step towards a feasible solution for robotic casualty manipulation.
Design Project of an Open-Source, Low-Cost, and Lightweight Robotic Manipulator for High School Students
Feb 21, 2023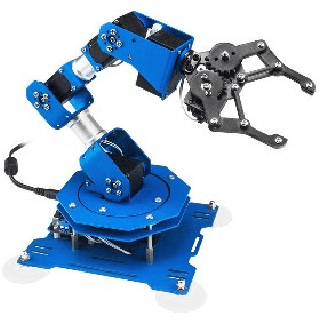

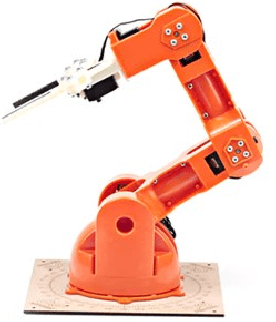
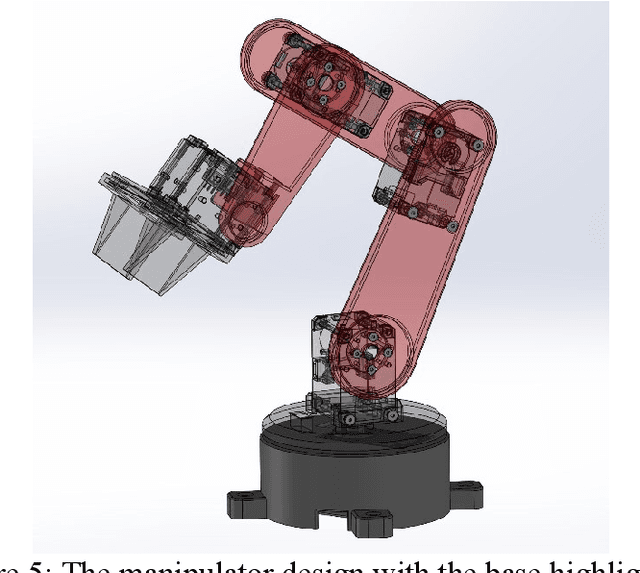
In recent years, there is an increasing interest in high school robotics extracurriculars such as robotics clubs and robotics competitions. The growing demand is a result of more ubiquitous open-source software and affordable off-the-shelf hardware kits, which significantly help lower the barrier for entry-level robotics hobbyists. In this project, we present an open-source, low-cost, and lightweight robotic manipulator designed and developed by a high school researcher under the guidance of a university faculty and a Ph.D. student. We believe the presented project is suitable for high school robotics research and educational activities. Our open-source package consists of mechanical design models, mechatronics specifications, and software program source codes. The mechanical design models include CAD (Computer Aided Design) files that are ready for prototyping (3D printing technology) and serve as an assembly guide accommodated with a complete bill of materials. Electrical wiring diagrams and low-level controllers are documented in detail as part of the open-source software package. The educational objective of this project is to enable high school student teams to replicate and build a robotic manipulator. The engineering experience that high school students acquire in the proposed project is full-stack, including mechanical design, mechatronics, and programming. The project significantly enriches their hands-on engineering experience in a project-based environment. Throughout this project, we discovered that the high school researcher was able to apply multidisciplinary knowledge from K-12 STEM courses to build the robotic manipulator. The researcher was able to go through a system engineering design and development process and obtain skills to use professional engineering tools including SolidWorks and Arduino microcontrollers.
A Lightweight Modular Continuum Manipulator with IMU-based Force Estimation
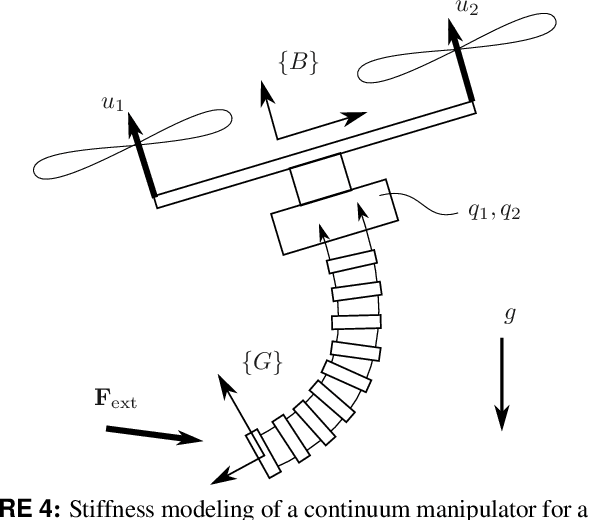
Nov 21, 2022Most aerial manipulators use serial rigid-link designs, which results in large forces when initiating contacts during manipulation and could cause flight stability difficulty. This limitation could potentially be improved by the compliance of continuum manipulators. To achieve this goal, we present the novel design of a compact, lightweight, and modular cable-driven continuum manipulator for aerial drones. We then derive a complete modeling framework for its kinematics, statics, and stiffness (compliance). The modeling framework can guide the control and design problems to integrate the manipulator to aerial drones. In addition, thanks to the derived stiffness (compliance) matrix, and using a low-cost IMU sensor to capture deformation angles, we present a simple method to estimate manipulation force at the tip of the manipulator. We report preliminary experimental validations of the hardware prototype, providing insights on its manipulation feasibility. We also report preliminary results of the IMU-based force estimation method.
A Modular Continuum Manipulator for Aerial Manipulation and Perching
Jun 13, 2022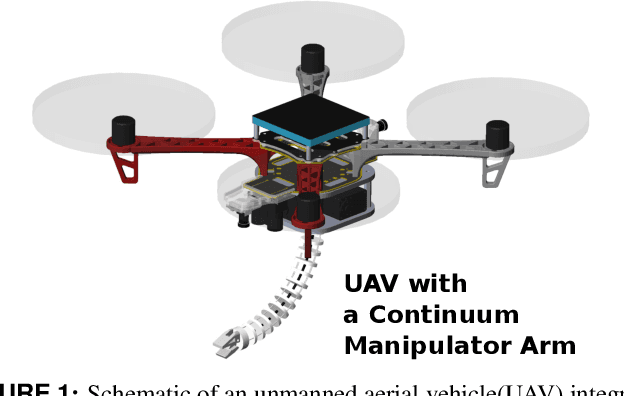
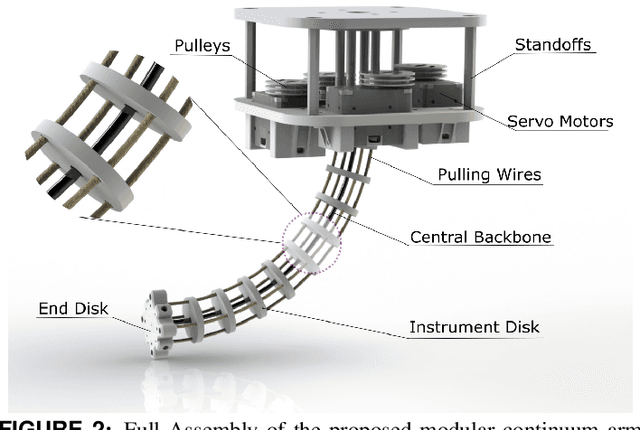
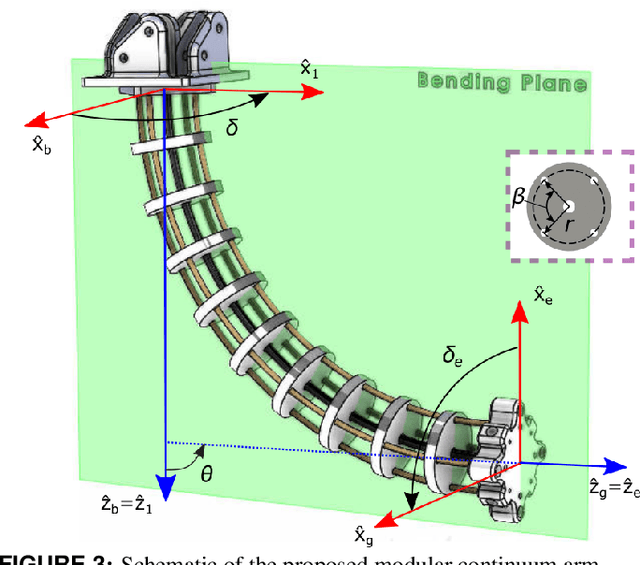
Most aerial manipulators use serial rigid-link designs, which results in large forces when initiating contacts during manipulation and could cause flight stability difficulty. This limitation could potentially be improved by the compliance of continuum manipulators. To achieve this goal, we present the novel design of a compact, lightweight, and modular cable-driven continuum manipulator for aerial drones. We then derive a complete modeling framework for its kinematics, statics, and stiffness (compliance). The framework is essential for integrating the manipulator to aerial drones. Finally, we report preliminary experimental validations of the hardware prototype, providing insights on its manipulation feasibility. Future work includes the integration and test of the proposed continuum manipulator with aerial drones.