 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Modular Continuum Manipulator for Aerial Manipulation and Perching
Paper and Code
Jun 13, 2022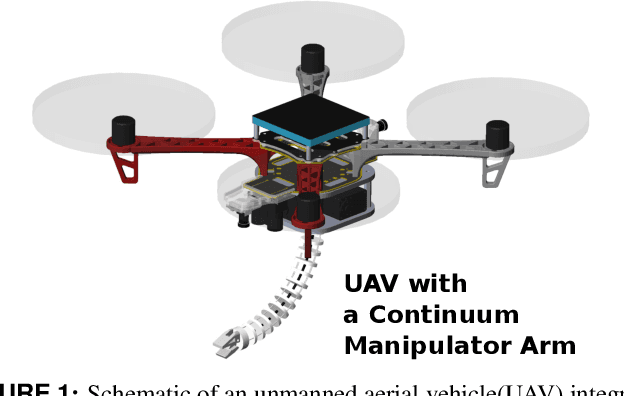
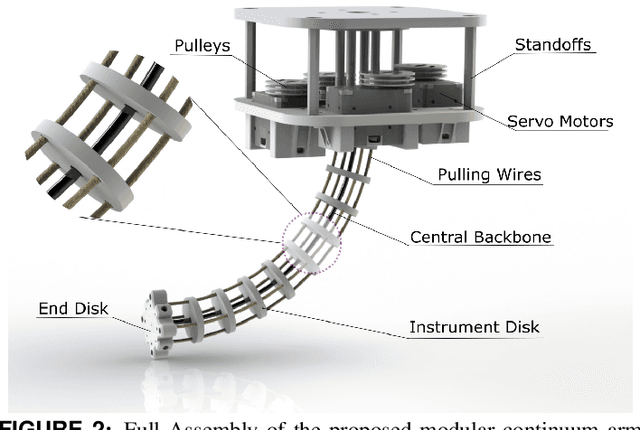
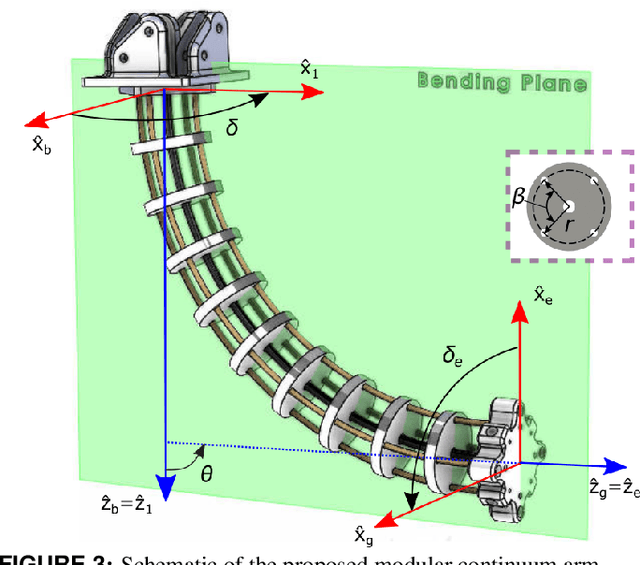
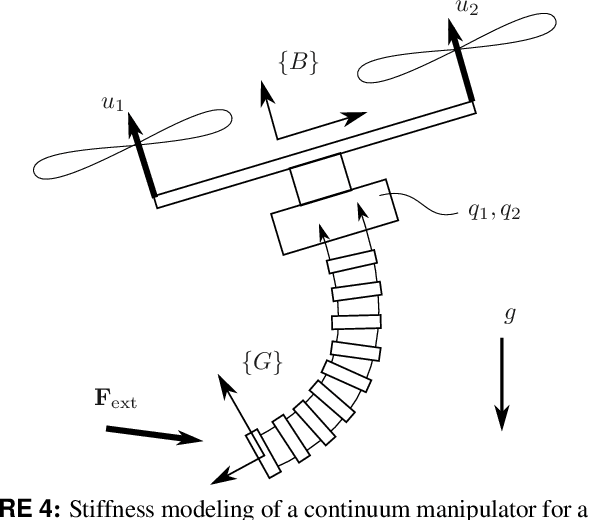
Most aerial manipulators use serial rigid-link designs, which results in large forces when initiating contacts during manipulation and could cause flight stability difficulty. This limitation could potentially be improved by the compliance of continuum manipulators. To achieve this goal, we present the novel design of a compact, lightweight, and modular cable-driven continuum manipulator for aerial drones. We then derive a complete modeling framework for its kinematics, statics, and stiffness (compliance). The framework is essential for integrating the manipulator to aerial drones. Finally, we report preliminary experimental validations of the hardware prototype, providing insights on its manipulation feasibility. Future work includes the integration and test of the proposed continuum manipulator with aerial drones.