 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApplying Ensemble Models based on Graph Neural Network and Reinforcement Learning for Wind Power Forecasting
Jan 28, 2025



Accurately predicting the wind power output of a wind farm across various time scales utilizing Wind Power Forecasting (WPF) is a critical issue in wind power trading and utilization. The WPF problem remains unresolved due to numerous influencing variables, such as wind speed, temperature, latitude, and longitude. Furthermore, achieving high prediction accuracy is crucial for maintaining electric grid stability and ensuring supply security. In this paper, we model all wind turbines within a wind farm as graph nodes in a graph built by their geographical locations. Accordingly, we propose an ensemble model based on graph neural networks and reinforcement learning (EMGRL) for WPF. Our approach includes: (1) applying graph neural networks to capture the time-series data from neighboring wind farms relevant to the target wind farm; (2) establishing a general state embedding that integrates the target wind farm's data with the historical performance of base models on the target wind farm; (3) ensembling and leveraging the advantages of all base models through an actor-critic reinforcement learning framework for WPF.
GAP-RL: Grasps As Points for RL Towards Dynamic Object Grasping
Oct 04, 2024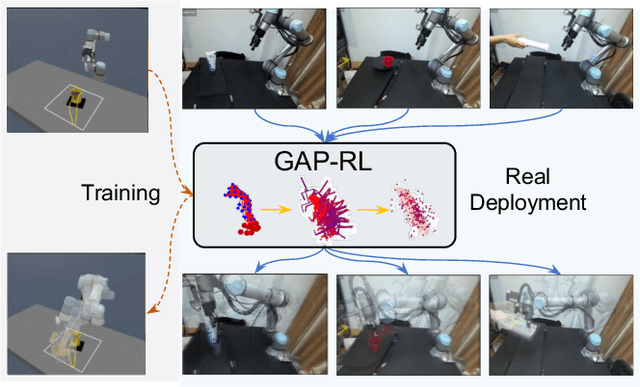
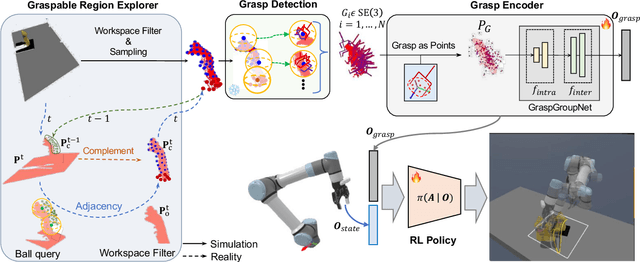
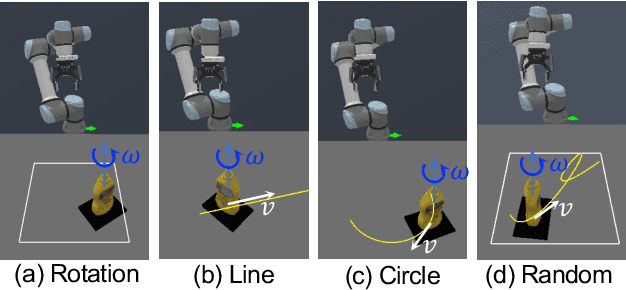
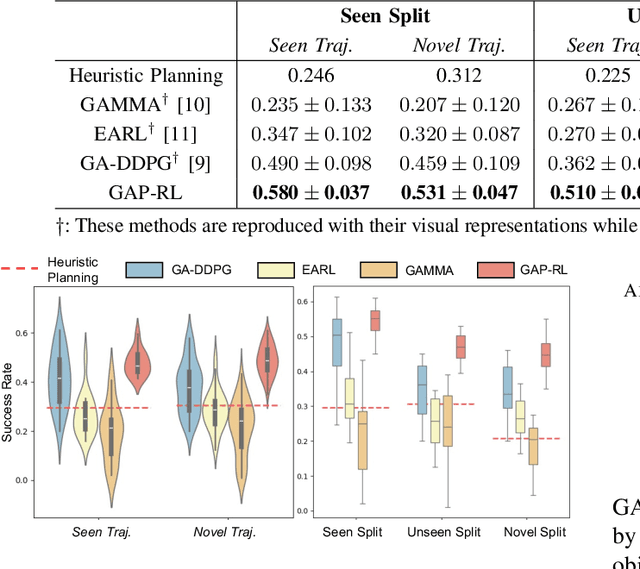
Dynamic grasping of moving objects in complex, continuous motion scenarios remains challenging. Reinforcement Learning (RL) has been applied in various robotic manipulation tasks, benefiting from its closed-loop property. However, existing RL-based methods do not fully explore the potential for enhancing visual representations. In this letter, we propose a novel framework called Grasps As Points for RL (GAP-RL) to effectively and reliably grasp moving objects. By implementing a fast region-based grasp detector, we build a Grasp Encoder by transforming 6D grasp poses into Gaussian points and extracting grasp features as a higher-level abstraction than the original object point features. Additionally, we develop a Graspable Region Explorer for real-world deployment, which searches for consistent graspable regions, enabling smoother grasp generation and stable policy execution. To assess the performance fairly, we construct a simulated dynamic grasping benchmark involving objects with various complex motions. Experiment results demonstrate that our method effectively generalizes to novel objects and unseen dynamic motions compared to other baselines. Real-world experiments further validate the framework's sim-to-real transferability.