 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBoundary representation learning via Transformer
Apr 07, 2025The recent rise of generative artificial intelligence (AI), powered by Transformer networks, has achieved remarkable success in natural language processing, computer vision, and graphics. However, the application of Transformers in computer-aided design (CAD), particularly for processing boundary representation (B-rep) models, remains largely unexplored. To bridge this gap, this paper introduces Boundary Representation Transformer (BRT), a novel method adapting Transformer for B-rep learning. B-rep models pose unique challenges due to their irregular topology and continuous geometric definitions, which are fundamentally different from the structured and discrete data Transformers are designed for. To address this, BRT proposes a continuous geometric embedding method that encodes B-rep surfaces (trimmed and untrimmed) into B\'ezier triangles, preserving their shape and continuity without discretization. Additionally, BRT employs a topology-aware embedding method that organizes these geometric embeddings into a sequence of discrete tokens suitable for Transformers, capturing both geometric and topological characteristics within B-rep models. This enables the Transformer's attention mechanism to effectively learn shape patterns and contextual semantics of boundary elements in a B-rep model. Extensive experiments demonstrate that BRT achieves state-of-the-art performance in part classification and feature recognition tasks.
PromptHash: Affinity-Prompted Collaborative Cross-Modal Learning for Adaptive Hashing Retrieval
Mar 20, 2025Cross-modal hashing is a promising approach for efficient data retrieval and storage optimization. However, contemporary methods exhibit significant limitations in semantic preservation, contextual integrity, and information redundancy, which constrains retrieval efficacy. We present PromptHash, an innovative framework leveraging affinity prompt-aware collaborative learning for adaptive cross-modal hashing. We propose an end-to-end framework for affinity-prompted collaborative hashing, with the following fundamental technical contributions: (i) a text affinity prompt learning mechanism that preserves contextual information while maintaining parameter efficiency, (ii) an adaptive gated selection fusion architecture that synthesizes State Space Model with Transformer network for precise cross-modal feature integration, and (iii) a prompt affinity alignment strategy that bridges modal heterogeneity through hierarchical contrastive learning. To the best of our knowledge, this study presents the first investigation into affinity prompt awareness within collaborative cross-modal adaptive hash learning, establishing a paradigm for enhanced semantic consistency across modalities. Through comprehensive evaluation on three benchmark multi-label datasets, PromptHash demonstrates substantial performance improvements over existing approaches. Notably, on the NUS-WIDE dataset, our method achieves significant gains of 18.22% and 18.65% in image-to-text and text-to-image retrieval tasks, respectively. The code is publicly available at https://github.com/ShiShuMo/PromptHash.
3D-PreMise: Can Large Language Models Generate 3D Shapes with Sharp Features and Parametric Control?
Jan 12, 2024Recent advancements in implicit 3D representations and generative models have markedly propelled the field of 3D object generation forward. However, it remains a significant challenge to accurately model geometries with defined sharp features under parametric controls, which is crucial in fields like industrial design and manufacturing. To bridge this gap, we introduce a framework that employs Large Language Models (LLMs) to generate text-driven 3D shapes, manipulating 3D software via program synthesis. We present 3D-PreMise, a dataset specifically tailored for 3D parametric modeling of industrial shapes, designed to explore state-of-the-art LLMs within our proposed pipeline. Our work reveals effective generation strategies and delves into the self-correction capabilities of LLMs using a visual interface. Our work highlights both the potential and limitations of LLMs in 3D parametric modeling for industrial applications.
XVoxel-Based Parametric Design Optimization of Feature Models
Mar 17, 2023



Parametric optimization is an important product design technique, especially in the context of the modern parametric feature-based CAD paradigm. Realizing its full potential, however, requires a closed loop between CAD and CAE (i.e., CAD/CAE integration) with automatic design modifications and simulation updates. Conventionally the approach of model conversion is often employed to form the loop, but this way of working is hard to automate and requires manual inputs. As a result, the overall optimization process is too laborious to be acceptable. To address this issue, a new method for parametric optimization is introduced in this paper, based on a unified model representation scheme called eXtended Voxels (XVoxels). This scheme hybridizes feature models and voxel models into a new concept of semantic voxels, where the voxel part is responsible for FEM solving, and the semantic part is responsible for high-level information to capture both design and simulation intents. As such, it can establish a direct mapping between design models and analysis models, which in turn enables automatic updates on simulation results for design modifications, and vice versa -- effectively a closed loop between CAD and CAE. In addition, robust and efficient geometric algorithms for manipulating XVoxel models and efficient numerical methods (based on the recent finite cell method) for simulating XVoxel models are provided. The presented method has been validated by a series of case studies of increasing complexity to demonstrate its effectiveness. In particular, a computational efficiency improvement of up to 55.8 times the existing FCM method has been seen.
Deep Learning Assisted Optimization for 3D Reconstruction from Single 2D Line Drawings
Sep 07, 2022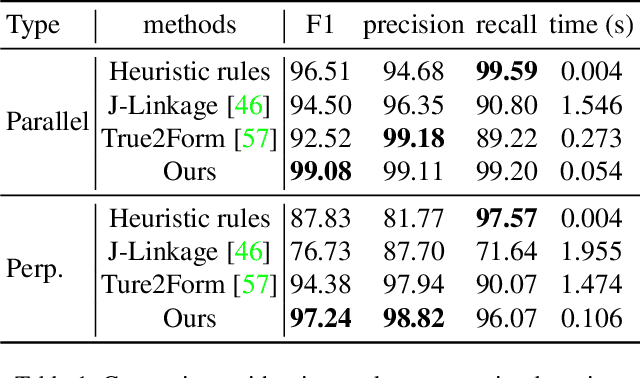
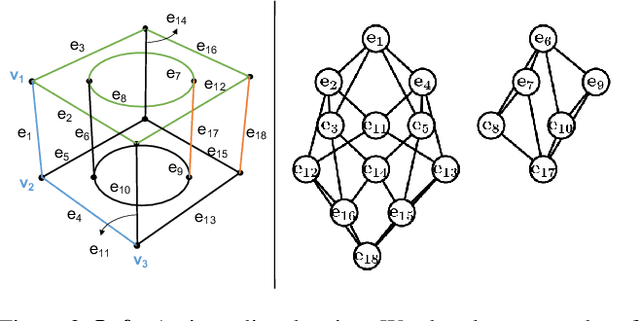
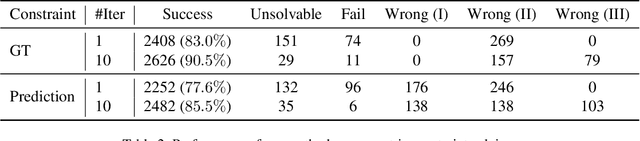
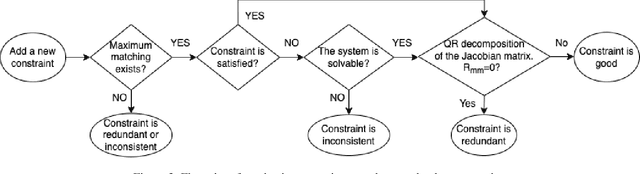
In this paper, we revisit the long-standing problem of automatic reconstruction of 3D objects from single line drawings. Previous optimization-based methods can generate compact and accurate 3D models, but their success rates depend heavily on the ability to (i) identifying a sufficient set of true geometric constraints, and (ii) choosing a good initial value for the numerical optimization. In view of these challenges, we propose to train deep neural networks to detect pairwise relationships among geometric entities (i.e., edges) in the 3D object, and to predict initial depth value of the vertices. Our experiments on a large dataset of CAD models show that, by leveraging deep learning in a geometric constraint solving pipeline, the success rate of optimization-based 3D reconstruction can be significantly improved.