 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimplified Self-homodyne Coherent System Based on Alamouti Coding and Digital Subcarrier Multiplexing
Mar 18, 2024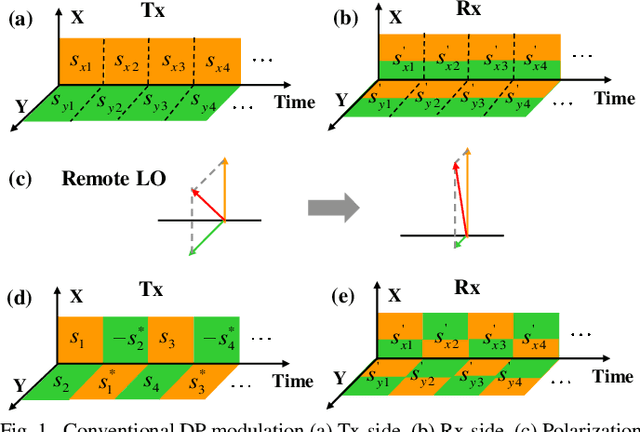
Coherent technology inherent with more availabledegrees of freedom is deemed a competitive solution for nextgeneration ultra-high-speed short-reach optical interconnects.However, the fatal barriers to implementing the conventiona.coherent system in short-reach optical interconnect are the costfootprint, and power consumption. Self-homodyne coherentsystem exhibits its potential to reduce the power consumption ofthe receiver-side digital signal processing (Rx-DSP) by deliveringthe local oscillator (LO) from the transmitter. However, anautomatic polarization controller (APC) is inevitable in the remoteLO link to avoid polarization fading, resulting in additional costsTo address the polarization fading issue, a simplified self.homodyne coherent system is proposed enabled by Alamouticoding in this paper. Benefiting from the Alamouti coding betweentwo polarizations, a polarization-insensitive receiver onlyincluding a 3dB coupler, a 90o Hybrid, and two balancedphotodiodes (BPDs)is sufficient for reception. Meanwhile, theAPC in the LO link is needless, simplifying the receiver structuresignificantly. Besides, the digital subcarrier multiplexing (DSCM)technique is also adopted to relax the computational complexity ofthe chromatic dispersion compensation (CDC), which is one of thedominant power consumption modules in Rx-DSP. Thetransmission performance of 50Gbaud 4-subcarrier 16/32OAM(4SC-16/320AM) DSCM signal based on the proposed simplifiedself-homodyne coherent system is investigated experimentallyThe results show that the bit-error-ratio(BER) performancedegradation caused by CD can be solved by increasing 4 taps inthe equalizer for 80km single mode fiber(SMF)transmissionwithout individual CDC, which operates in a low-complexitymanner.
Jacobian Methods for Dynamic Polarization Control in Optical Applications
Aug 29, 2022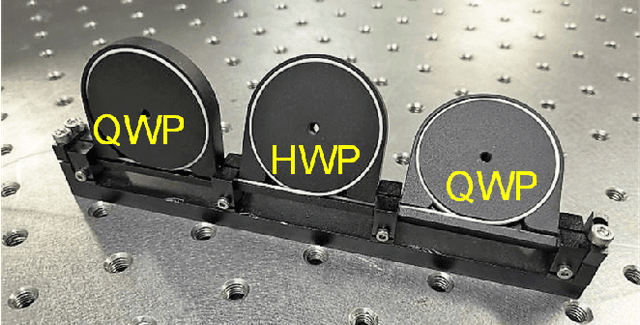
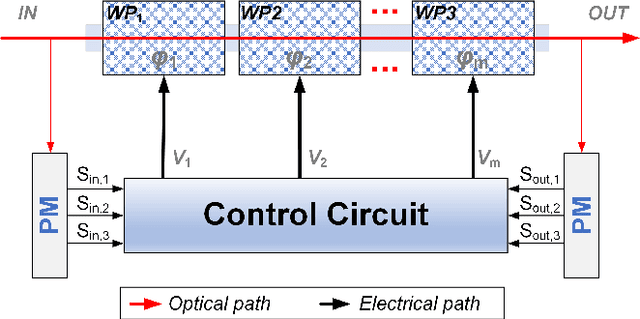
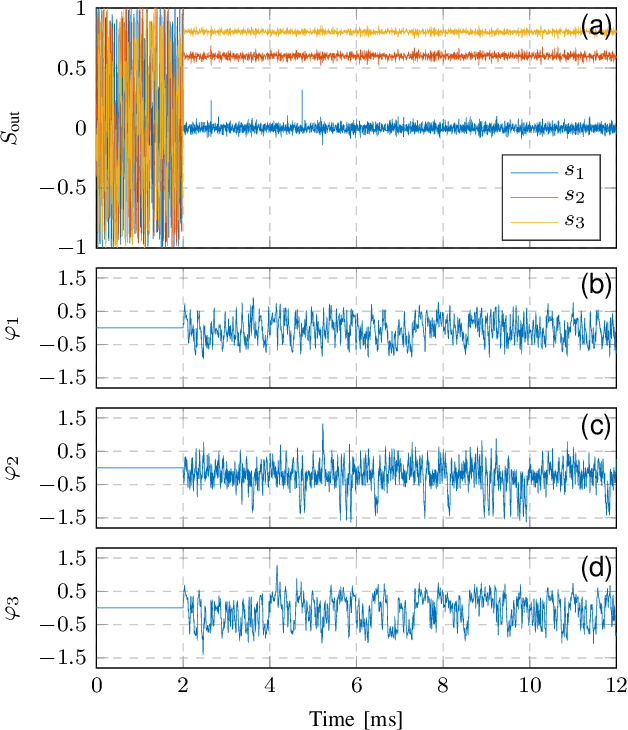
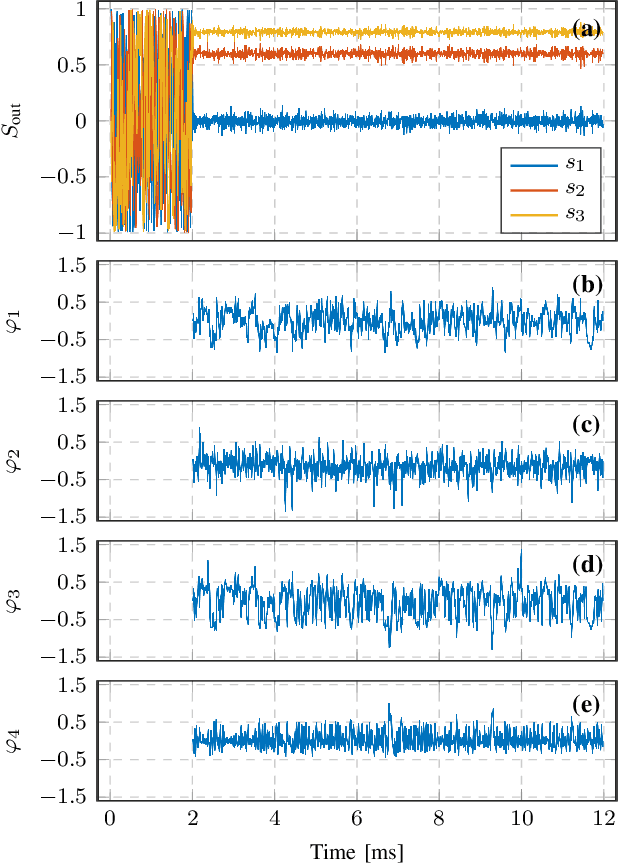
Dynamic polarization control (DPC) is beneficial for many optical applications. It uses adjustable waveplates to perform automatic polarization tracking and manipulation. Efficient algorithms are essential to realizing an endless polarization control process at high speed. However, the standard gradientbased algorithm is not well analyzed. Here we model the DPC with a Jacobian-based control theory framework that finds a lot in common with robot kinematics. We then give a detailed analysis of the condition of the Stokes vector gradient as a Jacobian matrix. We identify the multi-stage DPC as a redundant system enabling control algorithms with null-space operations. An efficient, reset-free algorithm can be found. We anticipate more customized DPC algorithms to follow the same framework in various optical systems.