 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgedtControl 2.0: Explainable Strategy Representation via Decision Tree Learning Steered by Experts
Jan 15, 2021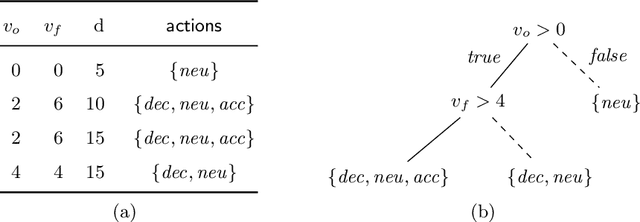
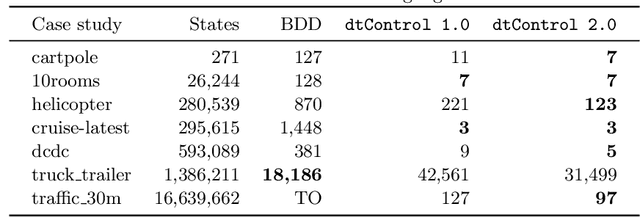
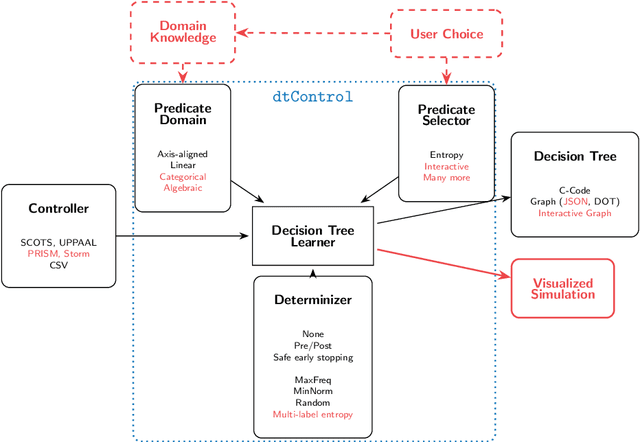
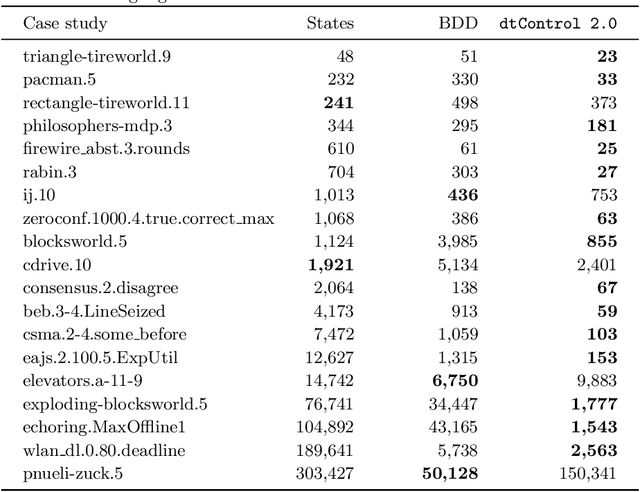
Recent advances have shown how decision trees are apt data structures for concisely representing strategies (or controllers) satisfying various objectives. Moreover, they also make the strategy more explainable. The recent tool dtControl had provided pipelines with tools supporting strategy synthesis for hybrid systems, such as SCOTS and Uppaal Stratego. We present dtControl 2.0, a new version with several fundamentally novel features. Most importantly, the user can now provide domain knowledge to be exploited in the decision tree learning process and can also interactively steer the process based on the dynamically provided information. To this end, we also provide a graphical user interface. It allows for inspection and re-computation of parts of the result, suggesting as well as receiving advice on predicates, and visual simulation of the decision-making process. Besides, we interface model checkers of probabilistic systems, namely Storm and PRISM and provide dedicated support for categorical enumeration-type state variables. Consequently, the controllers are more explainable and smaller.
DeepAbstract: Neural Network Abstraction for Accelerating Verification
Jun 24, 2020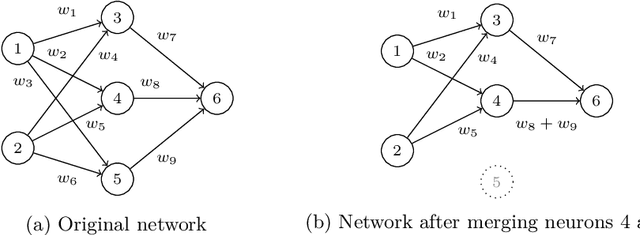
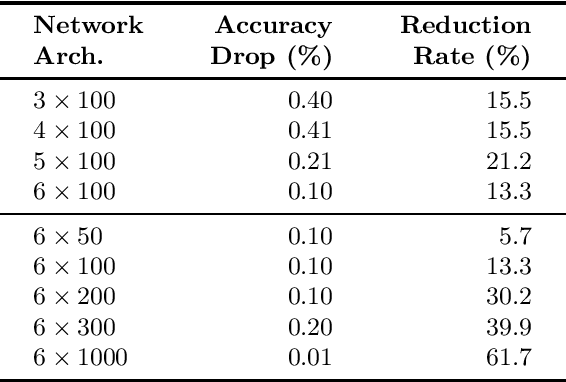
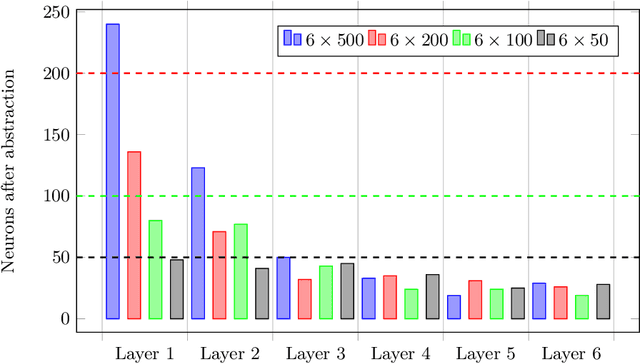
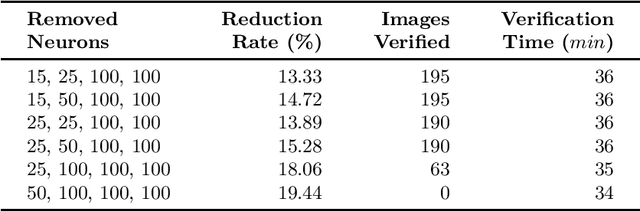
While abstraction is a classic tool of verification to scale it up, it is not used very often for verifying neural networks. However, it can help with the still open task of scaling existing algorithms to state-of-the-art network architectures. We introduce an abstraction framework applicable to fully-connected feed-forward neural networks based on clustering of neurons that behave similarly on some inputs. For the particular case of ReLU, we additionally provide error bounds incurred by the abstraction. We show how the abstraction reduces the size of the network, while preserving its accuracy, and how verification results on the abstract network can be transferred back to the original network.
dtControl: Decision Tree Learning Algorithms for Controller Representation
Feb 12, 2020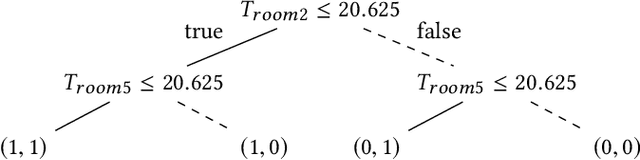
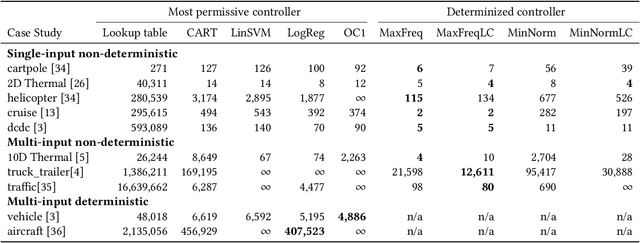

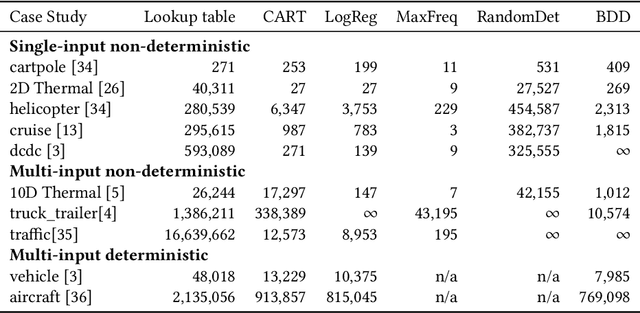
Decision tree learning is a popular classification technique most commonly used in machine learning applications. Recent work has shown that decision trees can be used to represent provably-correct controllers concisely. Compared to representations using lookup tables or binary decision diagrams, decision trees are smaller and more explainable. We present dtControl, an easily extensible tool for representing memoryless controllers as decision trees. We give a comprehensive evaluation of various decision tree learning algorithms applied to 10 case studies arising out of correct-by-construction controller synthesis. These algorithms include two new techniques, one for using arbitrary linear binary classifiers in the decision tree learning, and one novel approach for determinizing controllers during the decision tree construction. In particular the latter turns out to be extremely efficient, yielding decision trees with a single-digit number of decision nodes on 5 of the case studies.
PAC Statistical Model Checking for Markov Decision Processes and Stochastic Games
May 24, 2019



Statistical model checking (SMC) is a technique for analysis of probabilistic systems that may be (partially) unknown. We present an SMC algorithm for (unbounded) reachability yielding probably approximately correct (PAC) guarantees on the results. We consider both the setting (i) with no knowledge of the transition function (with the only quantity required a bound on the minimum transition probability) and (ii) with knowledge of the topology of the underlying graph. On the one hand, it is the first algorithm for stochastic games. On the other hand, it is the first practical algorithm even for Markov decision processes. Compared to previous approaches where PAC guarantees require running times longer than the age of universe even for systems with a handful of states, our algorithm often yields reasonably precise results within minutes, not requiring the knowledge of mixing time or the topology of the whole model.