 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeformable Gaussian Occupancy: Decoupling Rigid and Nonrigid Motion with Factorized Distillation
May 27, 2026Understanding dynamic 3D environments is essential for safe autonomous driving, particularly when reasoning about human-centric, nonrigid agents. However, existing weakly supervised occupancy prediction frameworks predominantly assume rigid-body motion and rely on simple frame-to-frame offsets, limiting their ability to capture fine-grained deformations and maintain temporal coherence. To address this issue, we propose DeGO, a deformable Gaussian occupancy framework that unifies decoupled Gaussian deformation with factorized 4D foundation-model distillation. DeGO disentangles rigid and nonrigid motion, enabling each Gaussian primitive to evolve through both deformation and offset-based updates. In parallel, a factorized 4D distillation strategy transfers cross-camera and cross-frame knowledge from the VGGT foundation model, producing foundation-aligned features that enhance temporal consistency. Experiments on the Occ3D-NuScenes benchmark demonstrate that our method achieves state-of-the-art performance under weak supervision, delivering 13.5% gains on human-centric instances and 10.9% overall improvements. These results highlight the effectiveness of deformation-aware and foundation-guided occupancy modeling for dynamic scene understanding. The code is publicly available: https://github.com/vita-epfl/DeGO
Drift-Resistant Navigation World Model with Anchored Epipolar Guidance
May 23, 2026We propose Drift-Resistant Navigation World Model, a generative model that mitigates both perceptual drift and geometric drift in conventional rollout-based navigation world models. Existing methods recursively feed generated content into subsequent steps, causing noise accumulation and degraded predictions, i.e., perceptual drift. Meanwhile, their predictions often deviate from the agent's motion, resulting in geometry drift. We address both types of drift by redesigning world-model prediction as an anchor-guided rollout. Instead of rolling out every frame sequentially, we first predict sparse future anchors that serve as stable long-range targets, and then generate intermediate frames within each chunk conditioned on both past context and future anchors. Importantly, these sparse anchors also provide geometric constraints, supported by bidirectional epipolar geometry, to localize where corresponding content should appear in the intermediate frames. Experiments on four benchmarks demonstrate consistent improvements over strong baselines in long-horizon visual quality, geometric consistency, and multi-view coherence. These gains further translate into improved downstream planning performance under the same planners, highlighting the importance of drift-resistant, geometry-aware prediction for reliable navigation world models.
EverAnimate: Minute-Scale Human Animation via Latent Flow Restoration
May 14, 2026We propose EverAnimate, an efficient post-training method for long-horizon animated video generation that preserves visual quality and character identity. Long-form animation remains challenging because highly dynamic human motion must be synthesized against relatively static environments, making chunk-based generation prone to accumulated drift: (i) low-level quality drift, such as progressive degradation of static backgrounds, and (ii) high-level semantic drift, such as inconsistent character identity and view-dependent attributes. To address this issue, EverAnimate restores drifted flow trajectories by anchoring generation to a persistent latent context memory, consisting of two complementary mechanisms. (i) Persistent Latent Propagation maintains a context memory across chunks to propagate identity and motion in latent space while mitigating temporal forgetting. (ii) Restorative Flow Matching introduces an implicit restoration objective during sampling through velocity adjustment, improving within-chunk fidelity. With only lightweight LoRA tuning, EverAnimate outperforms state-of-the-art long-animation methods in both short- and long-horizon settings: at 10 seconds, it improves PSNR/SSIM by 8%/7% and reduces LPIPS/FID by 22%/11%; at 90 seconds, the gains increase to 15%/15% and 32%/27%, respectively.
OmniTraj: Pre-Training on Heterogeneous Data for Adaptive and Zero-Shot Human Trajectory Prediction
Jul 31, 2025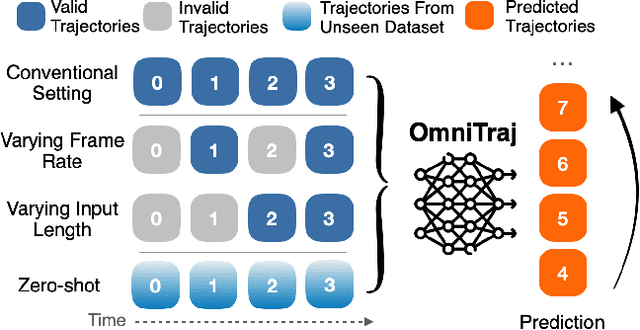
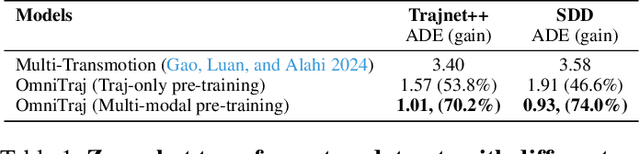
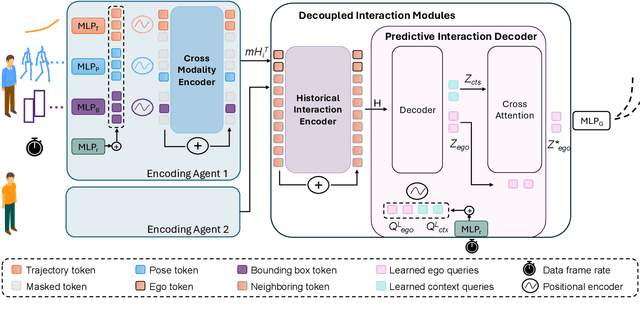
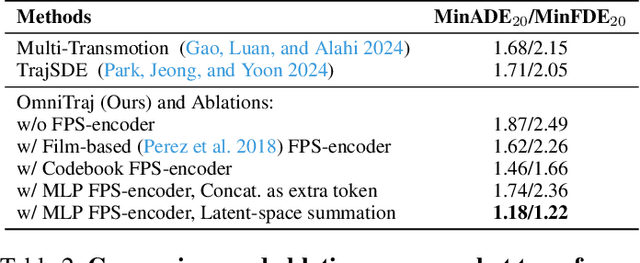
While large-scale pre-training has advanced human trajectory prediction, a critical challenge remains: zero-shot transfer to unseen dataset with varying temporal dynamics. State-of-the-art pre-trained models often require fine-tuning to adapt to new datasets with different frame rates or observation horizons, limiting their scalability and practical utility. In this work, we systematically investigate this limitation and propose a robust solution. We first demonstrate that existing data-aware discrete models struggle when transferred to new scenarios with shifted temporal setups. We then isolate the temporal generalization from dataset shift, revealing that a simple, explicit conditioning mechanism for temporal metadata is a highly effective solution. Based on this insight, we present OmniTraj, a Transformer-based model pre-trained on a large-scale, heterogeneous dataset. Our experiments show that explicitly conditioning on the frame rate enables OmniTraj to achieve state-of-the-art zero-shot transfer performance, reducing prediction error by over 70\% in challenging cross-setup scenarios. After fine-tuning, OmniTraj achieves state-of-the-art results on four datasets, including NBA, JTA, WorldPose, and ETH-UCY. The code is publicly available: https://github.com/vita-epfl/omnitraj
Unified Human Localization and Trajectory Prediction with Monocular Vision
Mar 05, 2025Conventional human trajectory prediction models rely on clean curated data, requiring specialized equipment or manual labeling, which is often impractical for robotic applications. The existing predictors tend to overfit to clean observation affecting their robustness when used with noisy inputs. In this work, we propose MonoTransmotion (MT), a Transformer-based framework that uses only a monocular camera to jointly solve localization and prediction tasks. Our framework has two main modules: Bird's Eye View (BEV) localization and trajectory prediction. The BEV localization module estimates the position of a person using 2D human poses, enhanced by a novel directional loss for smoother sequential localizations. The trajectory prediction module predicts future motion from these estimates. We show that by jointly training both tasks with our unified framework, our method is more robust in real-world scenarios made of noisy inputs. We validate our MT network on both curated and non-curated datasets. On the curated dataset, MT achieves around 12% improvement over baseline models on BEV localization and trajectory prediction. On real-world non-curated dataset, experimental results indicate that MT maintains similar performance levels, highlighting its robustness and generalization capability. The code is available at https://github.com/vita-epfl/MonoTransmotion.
Multi-Transmotion: Pre-trained Model for Human Motion Prediction
Nov 04, 2024The ability of intelligent systems to predict human behaviors is crucial, particularly in fields such as autonomous vehicle navigation and social robotics. However, the complexity of human motion have prevented the development of a standardized dataset for human motion prediction, thereby hindering the establishment of pre-trained models. In this paper, we address these limitations by integrating multiple datasets, encompassing both trajectory and 3D pose keypoints, to propose a pre-trained model for human motion prediction. We merge seven distinct datasets across varying modalities and standardize their formats. To facilitate multimodal pre-training, we introduce Multi-Transmotion, an innovative transformer-based model designed for cross-modality pre-training. Additionally, we present a novel masking strategy to capture rich representations. Our methodology demonstrates competitive performance across various datasets on several downstream tasks, including trajectory prediction in the NBA and JTA datasets, as well as pose prediction in the AMASS and 3DPW datasets. The code is publicly available: https://github.com/vita-epfl/multi-transmotion
Sim-to-Real Causal Transfer: A Metric Learning Approach to Causally-Aware Interaction Representations
Dec 07, 2023Modeling spatial-temporal interactions among neighboring agents is at the heart of multi-agent problems such as motion forecasting and crowd navigation. Despite notable progress, it remains unclear to which extent modern representations can capture the causal relationships behind agent interactions. In this work, we take an in-depth look at the causal awareness of these representations, from computational formalism to real-world practice. First, we cast doubt on the notion of non-causal robustness studied in the recent CausalAgents benchmark. We show that recent representations are already partially resilient to perturbations of non-causal agents, and yet modeling indirect causal effects involving mediator agents remains challenging. To address this challenge, we introduce a metric learning approach that regularizes latent representations with causal annotations. Our controlled experiments show that this approach not only leads to higher degrees of causal awareness but also yields stronger out-of-distribution robustness. To further operationalize it in practice, we propose a sim-to-real causal transfer method via cross-domain multi-task learning. Experiments on pedestrian datasets show that our method can substantially boost generalization, even in the absence of real-world causal annotations. We hope our work provides a new perspective on the challenges and potential pathways towards causally-aware representations of multi-agent interactions. Our code is available at https://github.com/socialcausality.