 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDoubly Inhomogeneous Reinforcement Learning
Nov 12, 2022



This paper studies reinforcement learning (RL) in doubly inhomogeneous environments under temporal non-stationarity and subject heterogeneity. In a number of applications, it is commonplace to encounter datasets generated by system dynamics that may change over time and population, challenging high-quality sequential decision making. Nonetheless, most existing RL solutions require either temporal stationarity or subject homogeneity, which would result in sub-optimal policies if both assumptions were violated. To address both challenges simultaneously, we propose an original algorithm to determine the ``best data chunks" that display similar dynamics over time and across individuals for policy learning, which alternates between most recent change point detection and cluster identification. Our method is general, and works with a wide range of clustering and change point detection algorithms. It is multiply robust in the sense that it takes multiple initial estimators as input and only requires one of them to be consistent. Moreover, by borrowing information over time and population, it allows us to detect weaker signals and has better convergence properties when compared to applying the clustering algorithm per time or the change point detection algorithm per subject. Empirically, we demonstrate the usefulness of our method through extensive simulations and a real data application.
Automatic Change-Point Detection in Time Series via Deep Learning
Nov 07, 2022Detecting change-points in data is challenging because of the range of possible types of change and types of behaviour of data when there is no change. Statistically efficient methods for detecting a change will depend on both of these features, and it can be difficult for a practitioner to develop an appropriate detection method for their application of interest. We show how to automatically generate new detection methods based on training a neural network. Our approach is motivated by many existing tests for the presence of a change-point being able to be represented by a simple neural network, and thus a neural network trained with sufficient data should have performance at least as good as these methods. We present theory that quantifies the error rate for such an approach, and how it depends on the amount of training data. Empirical results show that, even with limited training data, its performance is competitive with the standard CUSUM test for detecting a change in mean when the noise is independent and Gaussian, and can substantially outperform it in the presence of auto-correlated or heavy-tailed noise. Our method also shows strong results in detecting and localising changes in activity based on accelerometer data.
Reinforcement Learning in Possibly Nonstationary Environments
Mar 03, 2022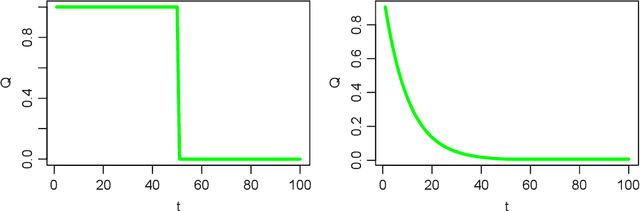
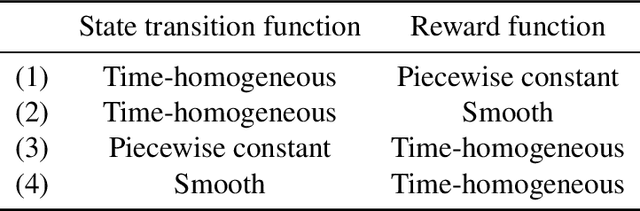
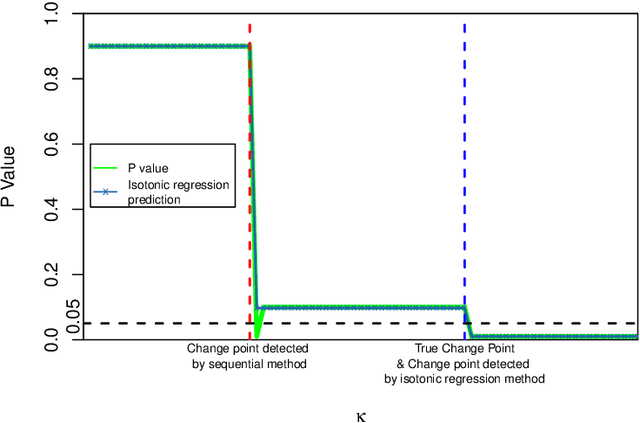

We consider reinforcement learning (RL) methods in offline nonstationary environments. Many existing RL algorithms in the literature rely on the stationarity assumption that requires the system transition and the reward function to be constant over time. However, the stationarity assumption is restrictive in practice and is likely to be violated in a number of applications, including traffic signal control, robotics and mobile health. In this paper, we develop a consistent procedure to test the nonstationarity of the optimal policy based on pre-collected historical data, without additional online data collection. Based on the proposed test, we further develop a sequential change point detection method that can be naturally coupled with existing state-of-the-art RL methods for policy optimisation in nonstationary environments. The usefulness of our method is illustrated by theoretical results, simulation studies, and a real data example from the 2018 Intern Health Study. A Python implementation of the proposed procedure is available at https://github.com/limengbinggz/CUSUM-RL