 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinear Unknown Input and State Estimation Algorithm in Mobile Robots
Apr 09, 2018

This technical report provides the description and the derivation of a novel nonlinear unknown input and state estimation algorithm (NUISE) for mobile robots. The algorithm is designed for real-world robots with nonlinear dynamic models and subject to stochastic noises on sensing and actuation. Leveraging sensor readings and planned control commands, the algorithm detects and quantifies anomalies on both sensors and actuators. Later, we elaborate the dynamic models of two distinctive mobile robots for the purpose of demonstrating the application of NUISE. This report serves as a supplementary document for [1].
Exploiting Physical Dynamics to Detect Actuator and Sensor Attacks in Mobile Robots
Aug 06, 2017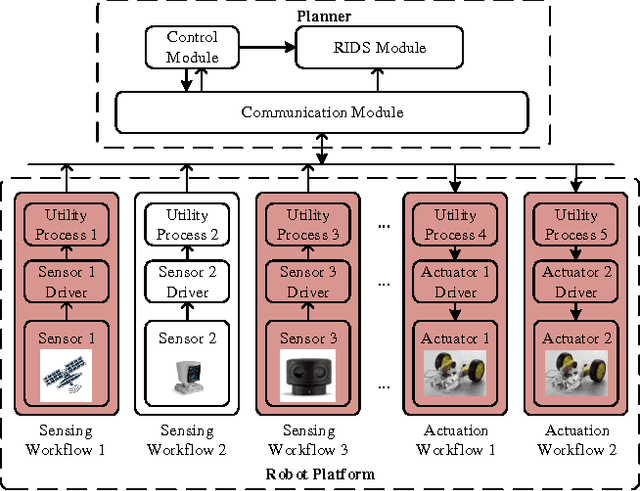


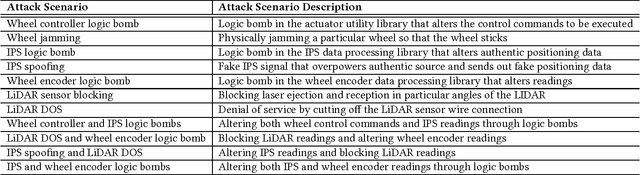
Mobile robots are cyber-physical systems where the cyberspace and the physical world are strongly coupled. Attacks against mobile robots can transcend cyber defenses and escalate into disastrous consequences in the physical world. In this paper, we focus on the detection of active attacks that are capable of directly influencing robot mission operation. Through leveraging physical dynamics of mobile robots, we develop RIDS, a novel robot intrusion detection system that can detect actuator attacks as well as sensor attacks for nonlinear mobile robots subject to stochastic noises. We implement and evaluate a RIDS on Khepera mobile robot against concrete attack scenarios via various attack channels including signal interference, sensor spoofing, logic bomb, and physical damage. Evaluation of 20 experiments shows that the averages of false positive rates and false negative rates are both below 1%. Average detection delay for each attack remains within 0.40s.