 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVoiceBank-2023: A Multi-Speaker Mandarin Speech Corpus for Constructing Personalized TTS Systems for the Speech Impaired
Aug 27, 2023



Services of personalized TTS systems for the Mandarin-speaking speech impaired are rarely mentioned. Taiwan started the VoiceBanking project in 2020, aiming to build a complete set of services to deliver personalized Mandarin TTS systems to amyotrophic lateral sclerosis patients. This paper reports the corpus design, corpus recording, data purging and correction for the corpus, and evaluations of the developed personalized TTS systems, for the VoiceBanking project. The developed corpus is named after the VoiceBank-2023 speech corpus because of its release year. The corpus contains 29.78 hours of utterances with prompts of short paragraphs and common phrases spoken by 111 native Mandarin speakers. The corpus is labeled with information about gender, degree of speech impairment, types of users, transcription, SNRs, and speaking rates. The VoiceBank-2023 is available by request for non-commercial use and welcomes all parties to join the VoiceBanking project to improve the services for the speech impaired.
Probabilistic Inference in Planning for Partially Observable Long Horizon Problems
Oct 18, 2021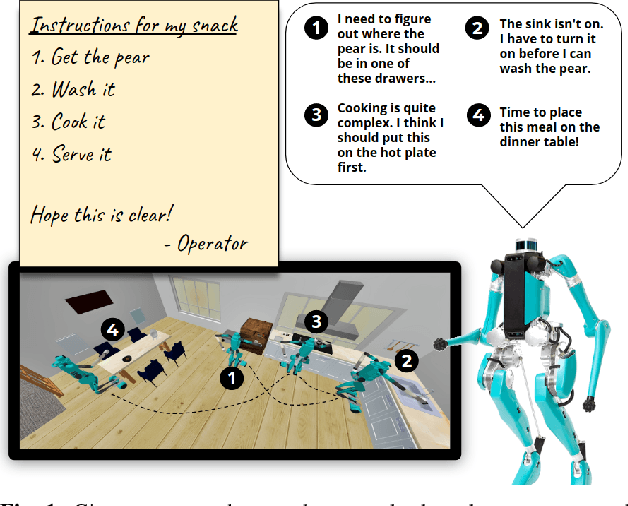
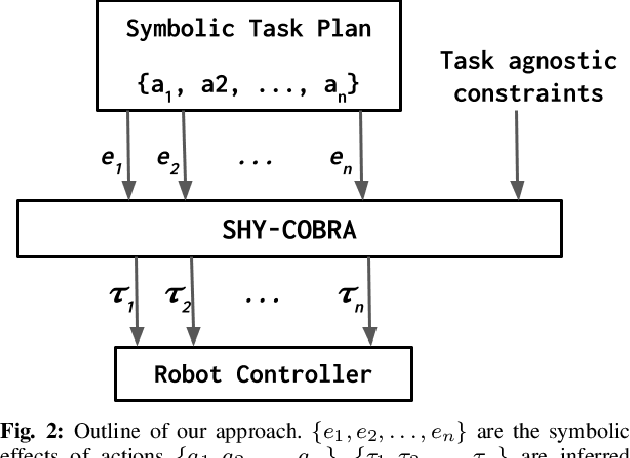
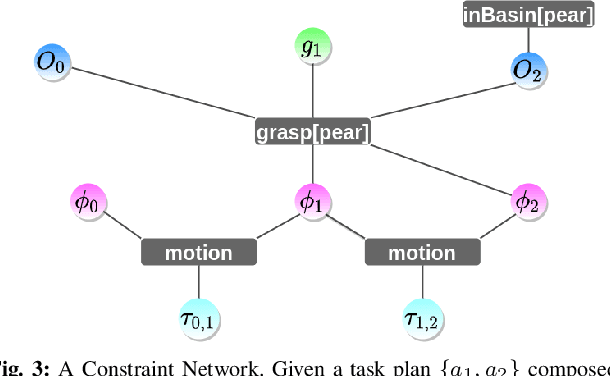
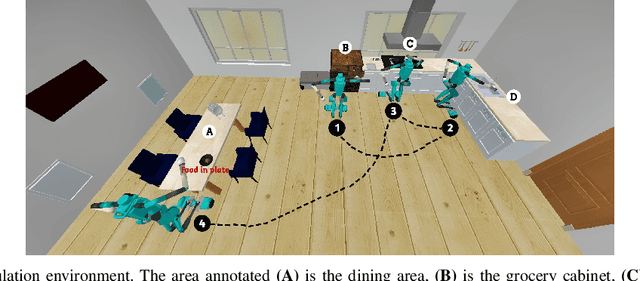
For autonomous service robots to successfully perform long horizon tasks in the real world, they must act intelligently in partially observable environments. Most Task and Motion Planning approaches assume full observability of their state space, making them ineffective in stochastic and partially observable domains that reflect the uncertainties in the real world. We propose an online planning and execution approach for performing long horizon tasks in partially observable domains. Given the robot's belief and a plan skeleton composed of symbolic actions, our approach grounds each symbolic action by inferring continuous action parameters needed to execute the plan successfully. To achieve this, we formulate the problem of joint inference of action parameters as a Hybrid Constraint Satisfaction Problem (H-CSP) and solve the H-CSP using Belief Propagation. The robot executes the resulting parameterized actions, updates its belief of the world and replans when necessary. Our approach is able to efficiently solve partially observable tasks in a realistic kitchen simulation environment. Our approach outperformed an adaptation of the state-of-the-art method across our experiments.