 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Ankle Torque Control for Bipedal Humanoid Walking on Surfaces with Unknown Horizontal and Vertical Motion
Oct 15, 2024



Achieving stable bipedal walking on surfaces with unknown motion remains a challenging control problem due to the hybrid, time-varying, partially unknown dynamics of the robot and the difficulty of accurate state and surface motion estimation. Surface motion imposes uncertainty on both system parameters and non-homogeneous disturbance in the walking robot dynamics. In this paper, we design an adaptive ankle torque controller to simultaneously address these two uncertainties and propose a step-length planner to minimize the required control torque. Typically, an adaptive controller is used for a continuous system. To apply adaptive control on a hybrid system such as a walking robot, an intermediate command profile is introduced to ensure a continuous error system. Simulations on a planar bipedal robot, along with comparisons against a baseline controller, demonstrate that the proposed approach effectively ensures stable walking and accurate tracking under unknown, time-varying disturbances.
Saturation region of Freeway Networks under Safe Microscopic Ramp Metering
Jul 05, 2022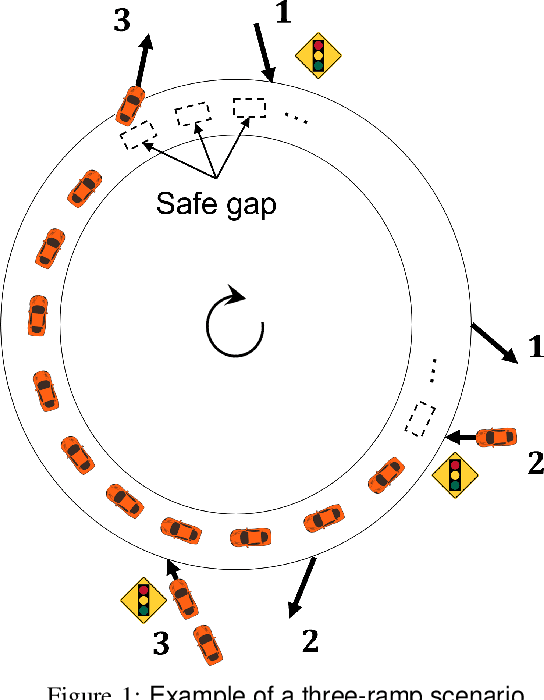

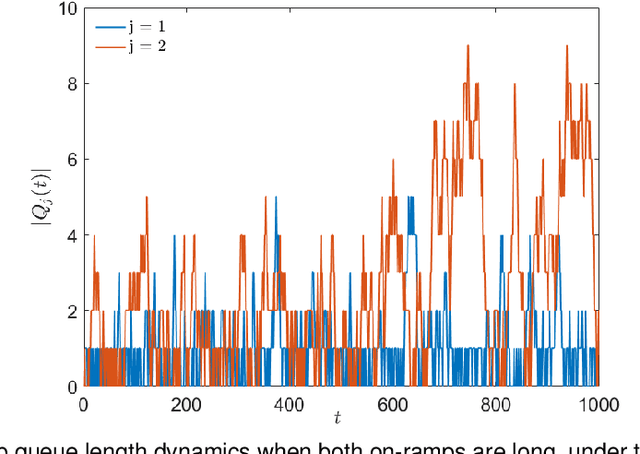
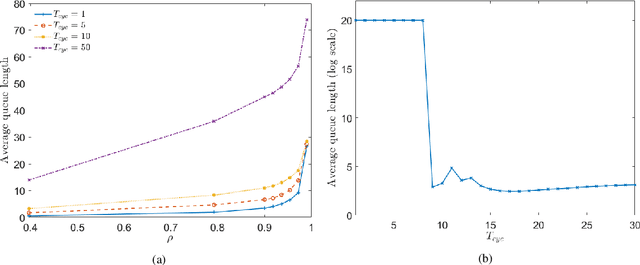
We consider ramp metering at the microscopic level subject to vehicle safety constraint. The traffic network is abstracted by a ring road with multiple on- and off-ramps. The arrival times of vehicles to the on-ramps, as well as their destination off-ramps are modeled by exogenous stochastic processes. Once a vehicle is released from an on-ramp, it accelerates towards the free flow speed if it is not obstructed by another vehicle; once it gets close to another vehicle, it adopts a safe behavior. The vehicle exits the traffic network once it reaches its destination off-ramp. We design traffic-responsive ramp metering policies which maximize the saturation region of the network. The saturation region of a policy is defined as the set of demands, i.e., arrival rates and the routing matrix, for which the queue lengths at all the on-ramps remain bounded in expectation. The proposed ramp metering policies operate under synchronous cycles during which an on-ramp does not release more vehicles than its queue length at the beginning of the cycle. We provide three policies under which, respectively, each on-ramp (i) pauses release for a time-interval at the end of the cycle, or (ii) modulates the release rate during the cycle, or (iii) adopts a conservative safety criterion for release during the cycle. None of the policies, however, require information about the demand. The saturation region of these policies is characterized by studying stochastic stability of the induced Markov chains, and is proven to be maximal when the merging speed of all on-ramps equals the free flow speed. Simulations are provided to illustrate the performance of the policies.
Integrated Traffic Simulation-Prediction System using Neural Networks with Application to the Los Angeles International Airport Road Network
Aug 05, 2020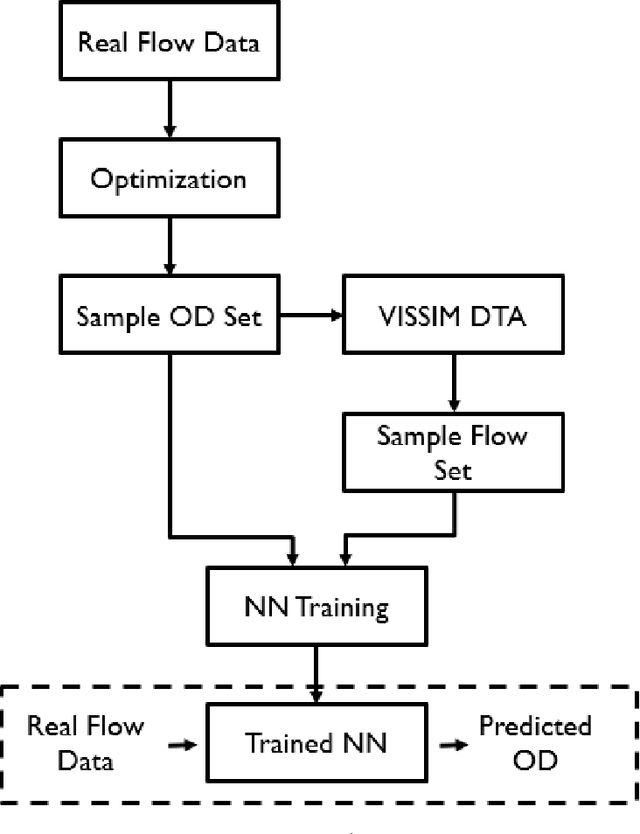
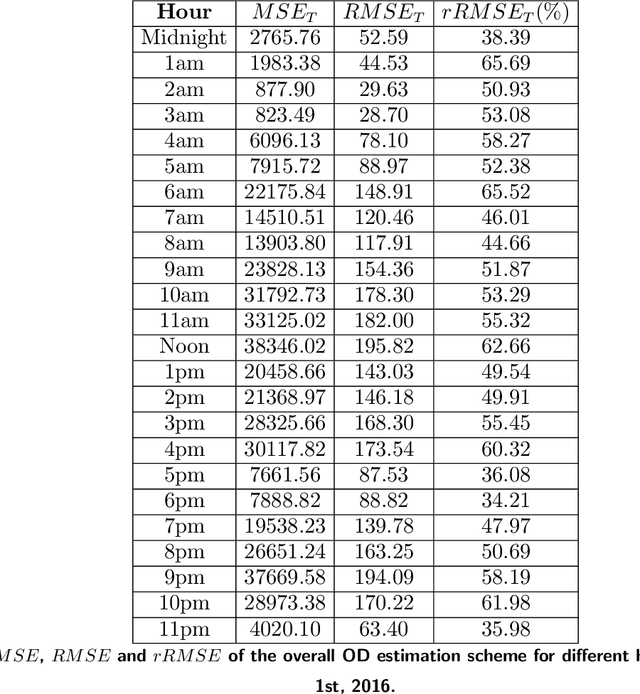
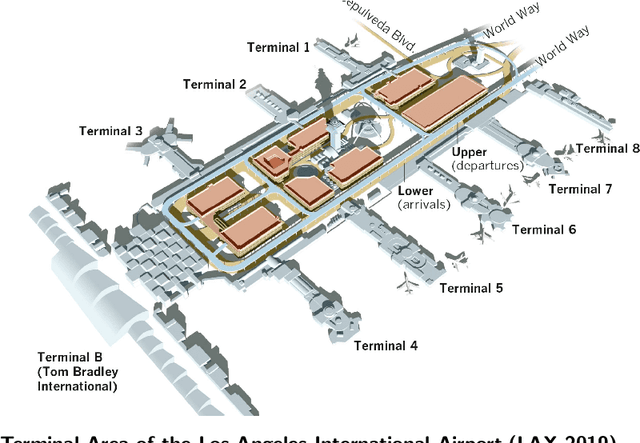
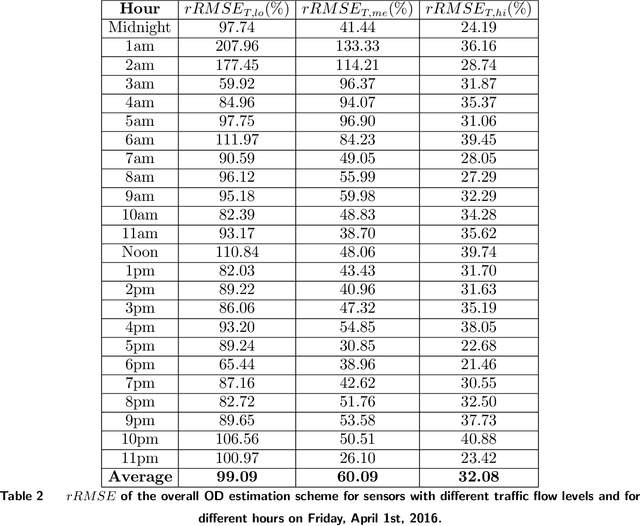
Transportation networks are highly complex and the design of efficient traffic management systems is difficult due to lack of adequate measured data and accurate predictions of the traffic states. Traffic simulation models can capture the complex dynamics of transportation networks by using limited available traffic data and can help central traffic authorities in their decision-making, if appropriate input is fed into the simulator. In this paper, we design an integrated simulation-prediction system which estimates the Origin-Destination (OD) matrix of a road network using only flow rate information and predicts the behavior of the road network in different simulation scenarios. The proposed system includes an optimization-based OD matrix generation method, a Neural Network (NN) model trained to predict OD matrices via the pattern of traffic flow and a microscopic traffic simulator with a Dynamic Traffic Assignment (DTA) scheme to predict the behavior of the transportation system. We test the proposed system on the road network of the central terminal area (CTA) of the Los Angeles International Airport (LAX), which demonstrates that the integrated traffic simulation-prediction system can be used to simulate the effects of several real world scenarios such as lane closures, curbside parking and other changes. The model is an effective tool for learning the impact and possible benefits of changes in the network and for analyzing scenarios at a very low cost without disrupting the network.