 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFractals2019: Combinatorial Optimisation with Dynamic Constraint Annealing
Oct 14, 2019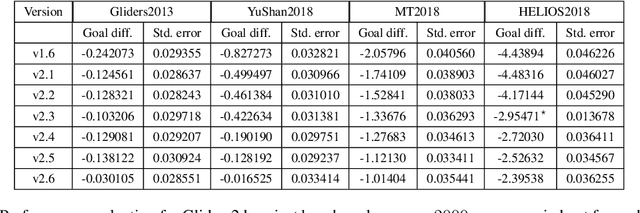
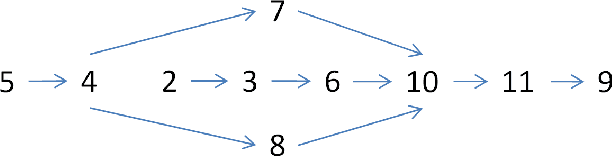
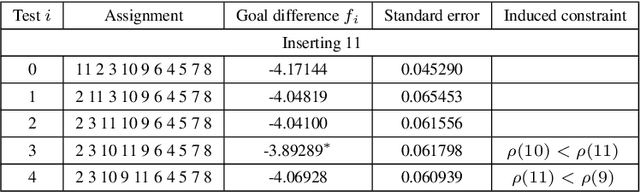
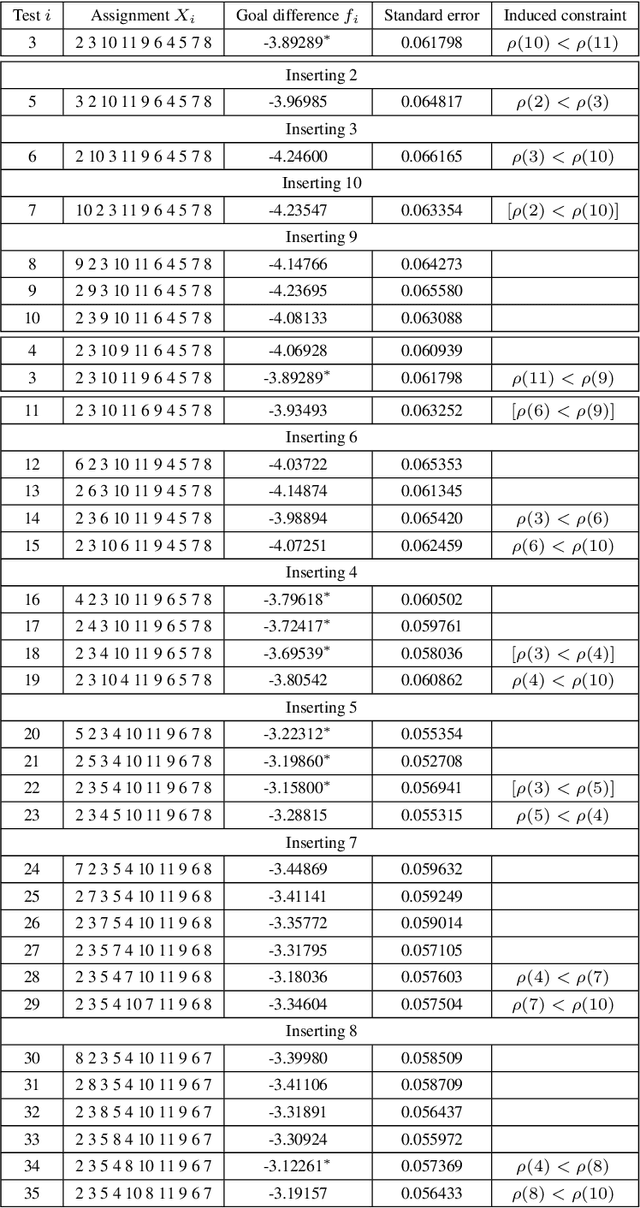
Fractals2019 started as a new experimental entry in the RoboCup Soccer 2D Simulation League, based on Gliders2d code base, and advanced to become a RoboCup-2019 champion. We employ combinatorial optimisation methods, within the framework of Guided Self-Organisation, with the search guided by local constraints. We present examples of several tactical tasks based on the Gliders2d code (version v2), including the search for an optimal assignment of heterogeneous player types, as well as blocking behaviours, offside trap, and attacking formations. We propose a new method, Dynamic Constraint Annealing, for solving dynamic constraint satisfaction problems, and apply it to optimise thermodynamic potential of collective behaviours, under dynamically induced constraints.
Photometric light curves classification with machine learning
Sep 10, 2019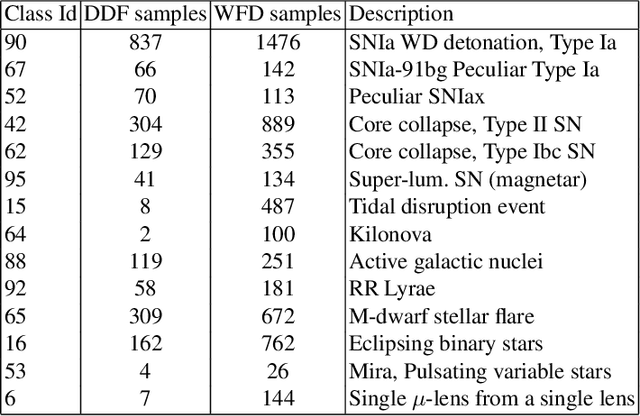

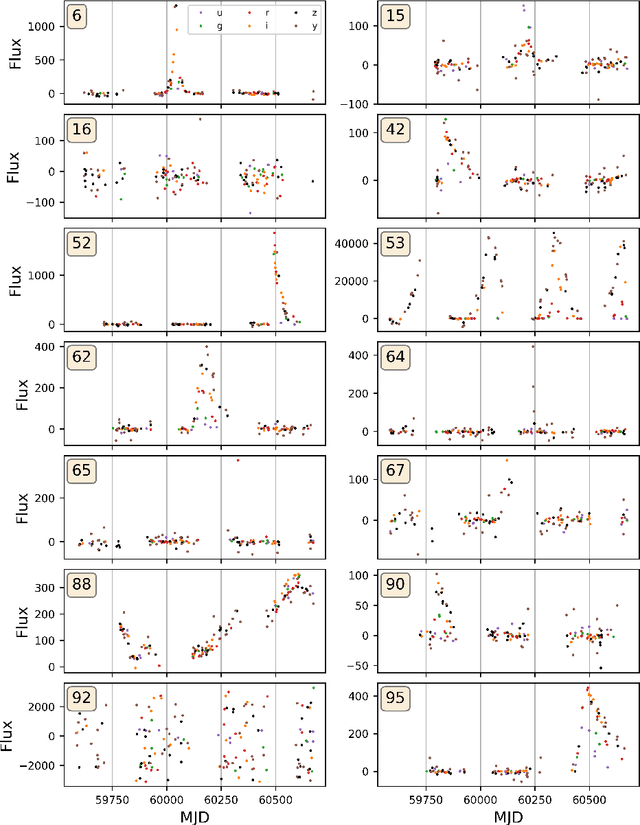

The Large Synoptic Survey Telescope will complete its survey in 2022 and produce terabytes of imaging data each night. To work with this massive onset of data, automated algorithms to classify astronomical light curves are crucial. Here, we present a method for automated classification of photometric light curves for a range of astronomical objects. Our approach is based on the gradient boosting of decision trees, feature extraction and selection, and augmentation. The solution was developed in the context of The Photometric LSST Astronomical Time Series Classification Challenge (PLAsTiCC) and achieved one of the top results in the challenge.
Hierarchical Model for Long-term Video Prediction
Jul 03, 2017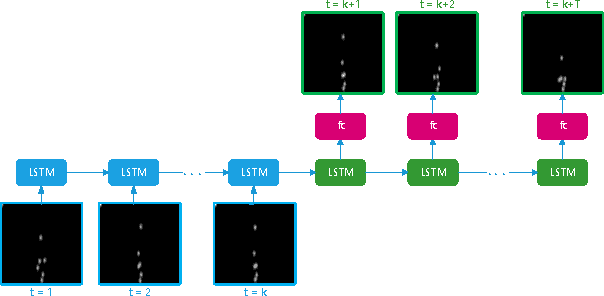
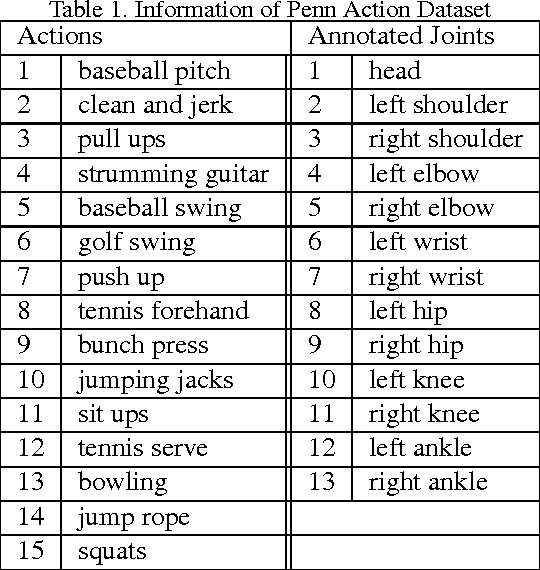
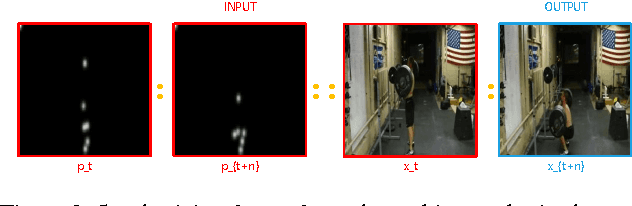
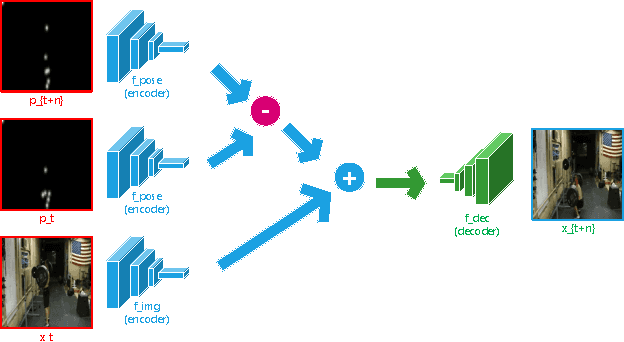
Video prediction has been an active topic of research in the past few years. Many algorithms focus on pixel-level predictions, which generates results that blur and disintegrate within a few frames. In this project, we use a hierarchical approach for long-term video prediction. We aim at estimating high-level structure in the input frame first, then predict how that structure grows in the future. Finally, we use an image analogy network to recover a realistic image from the predicted structure. Our method is largely adopted from the work by Villegas et al. The method is built with a combination of LSTMs and analogy-based convolutional auto-encoder networks. Additionally, in order to generate more realistic frame predictions, we also adopt adversarial loss. We evaluate our method on the Penn Action dataset, and demonstrate good results on high-level long-term structure prediction.
Simulation leagues: Enabling replicable and robust investigation of complex robotic systems
Dec 18, 2014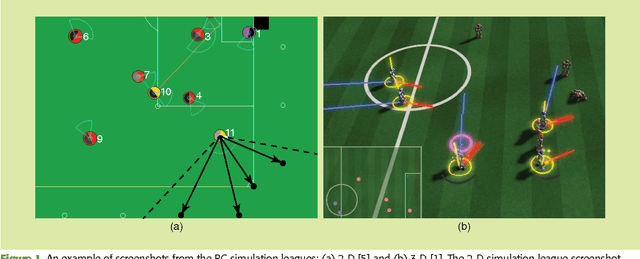


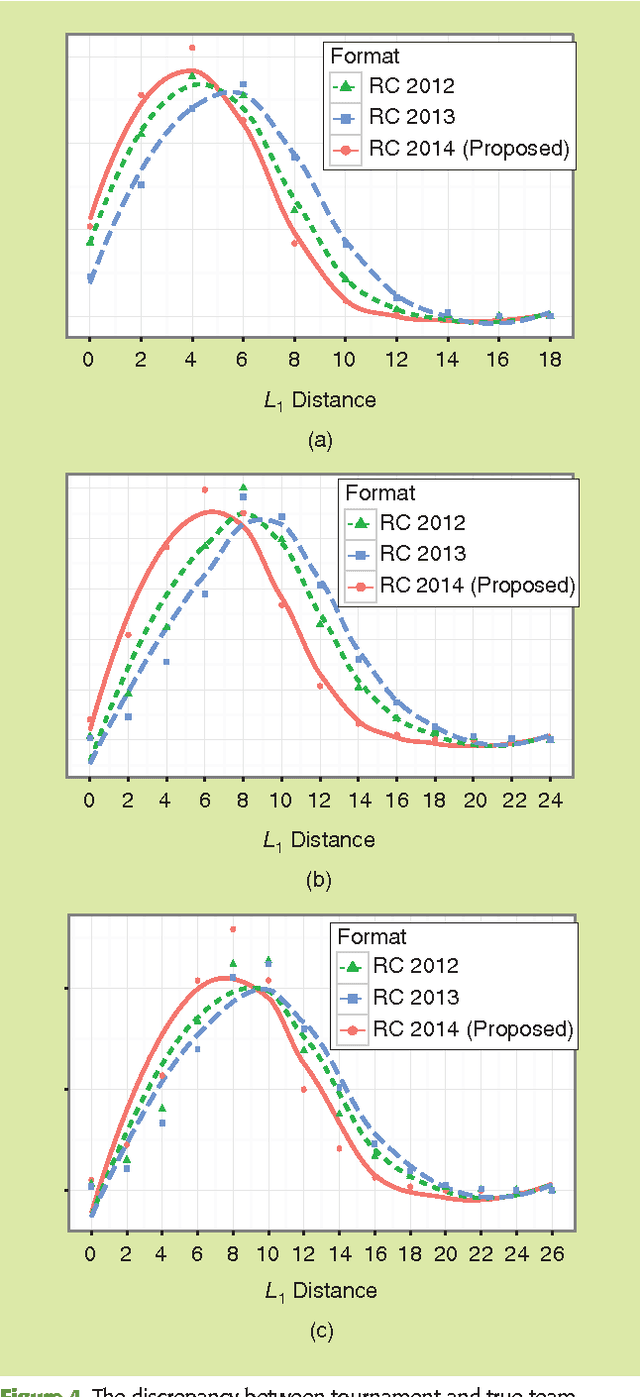
Physically-realistic simulated environments are powerful platforms for enabling measurable, replicable and statistically-robust investigation of complex robotic systems. Such environments are epitomised by the RoboCup simulation leagues, which have been successfully utilised to conduct massively-parallel experiments in topics including: optimisation of bipedal locomotion, self-localisation from noisy perception data and planning complex multi-agent strategies without direct agent-to-agent communication. Many of these systems are later transferred to physical robots, making the simulation leagues invaluable well-beyond the scope of simulated soccer matches. In this study, we provide an overview of the RoboCup simulation leagues and describe their properties as they pertain to replicable and robust robotics research. To demonstrate their utility directly, we leverage the ability to run parallelised experiments to evaluate different competition formats (e.g. round robin) for the RoboCup 2D simulation league. Our results demonstrate that a previously-proposed hybrid format minimises fluctuations from 'true' (statistically-significant) team performance rankings within the time constraints of the RoboCup world finals. Our experimental analysis would be impossible with physical robots alone, and we encourage other researchers to explore the potential for enriching their experimental pipelines with simulated components, both to minimise experimental costsand enable others to replicate and expand upon their results in a hardware-independent manner.
Simulation leagues: Analysis of competition formats
Jun 26, 2014
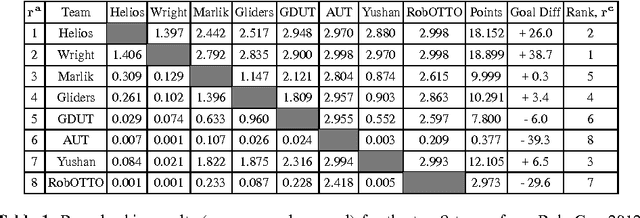
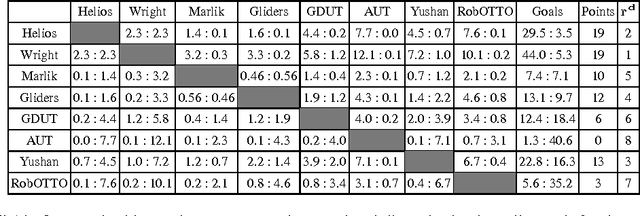
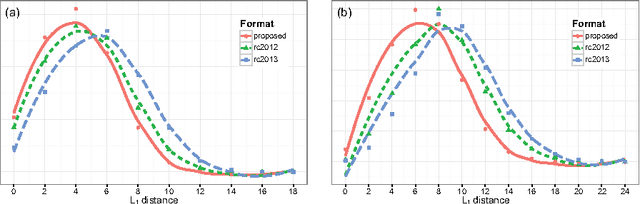
The selection of an appropriate competition format is critical for both the success and credibility of any competition, both real and simulated. In this paper, the automated parallelism offered by the RoboCupSoccer 2D simulation league is leveraged to conduct a 28,000 game round-robin between the top 8 teams from RoboCup 2012 and 2013. A proposed new competition format is found to reduce variation from the resultant statistically significant team performance rankings by 75% and 67%, when compared to the actual competition results from RoboCup 2012 and 2013 respectively. These results are statistically validated by generating 10,000 random tournaments for each of the three considered formats and comparing the respective distributions of ranking discrepancy.
Gliders2012: Development and Competition Results
Nov 21, 2012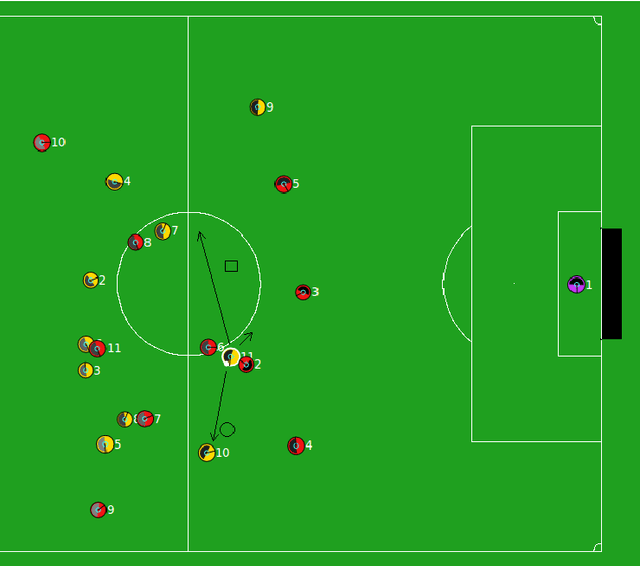
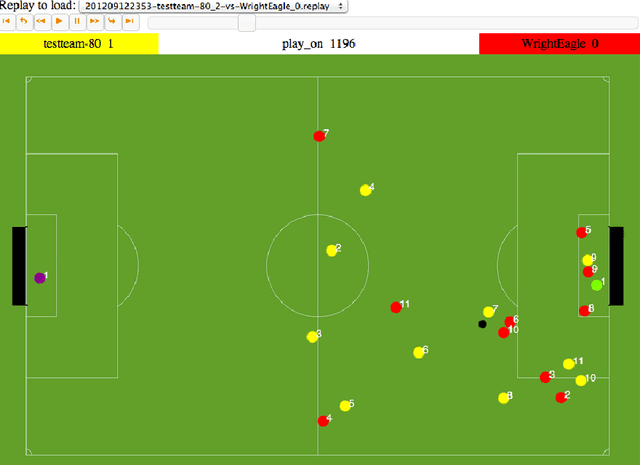

The RoboCup 2D Simulation League incorporates several challenging features, setting a benchmark for Artificial Intelligence (AI). In this paper we describe some of the ideas and tools around the development of our team, Gliders2012. In our description, we focus on the evaluation function as one of our central mechanisms for action selection. We also point to a new framework for watching log files in a web browser that we release for use and further development by the RoboCup community. Finally, we also summarize results of the group and final matches we played during RoboCup 2012, with Gliders2012 finishing 4th out of 19 teams.