 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Grasp Loop Signature: A Topological Representation for Manipulation Planning with Ropes and Cables
Mar 03, 2024Robotic manipulation of deformable, one-dimensional objects (DOOs) like ropes or cables has important potential applications in manufacturing, agriculture, and surgery. In such environments, the task may involve threading through or avoiding becoming tangled with objects like racks or frames. Grasping with multiple grippers can create closed loops between the robot and DOO, and If an obstacle lies within this loop, it may be impossible to reach the goal. However, prior work has only considered the topology of the DOO in isolation, ignoring the arms that are manipulating it. Searching over possible grasps to accomplish the task without considering such topological information is very inefficient, as many grasps will not lead to progress on the task due to topological constraints. Therefore, we propose a grasp loop signature which categorizes the topology of these grasp loops and show how it can be used to guide planning. We perform experiments in simulation on two DOO manipulation tasks to show that using the signature is faster and succeeds more often than methods that rely on local geometry or finite-horizon planning. Finally, we demonstrate using the signature in the real world to manipulate a cable in a scene with obstacles using a dual-arm robot.
Focused Adaptation of Dynamics Models for Deformable Object Manipulation
Sep 28, 2022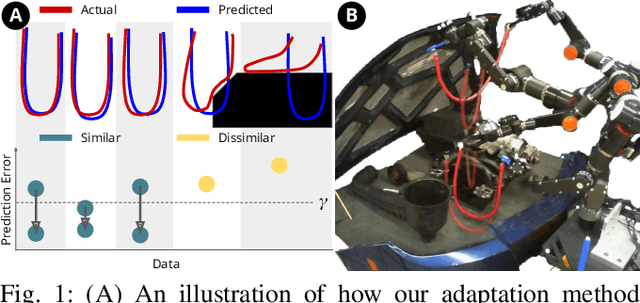
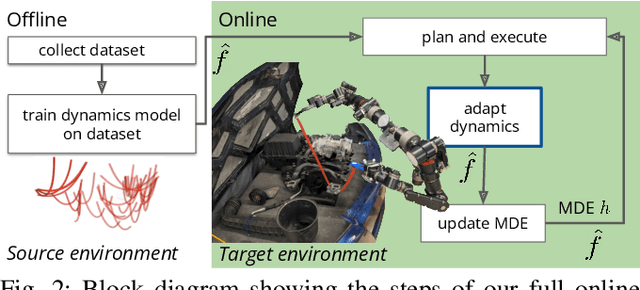
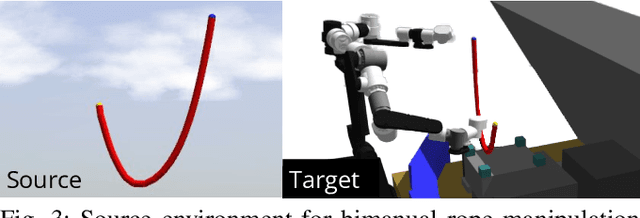
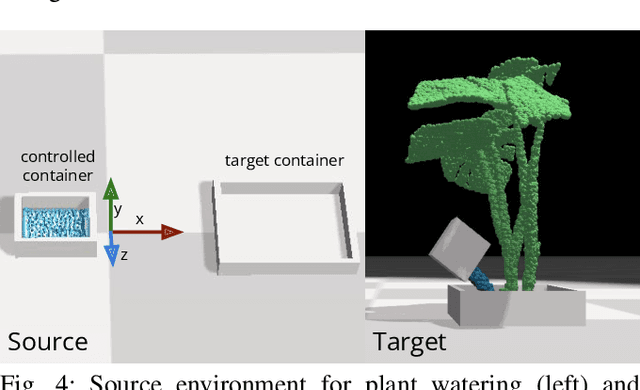
In order to efficiently learn a dynamics model for a task in a new environment, one can adapt a model learned in a similar source environment. However, existing adaptation methods can fail when the target dataset contains transitions where the dynamics are very different from the source environment. For example, the source environment dynamics could be of a rope manipulated in free-space, whereas the target dynamics could involve collisions and deformation on obstacles. Our key insight is to improve data efficiency by focusing model adaptation on only the regions where the source and target dynamics are similar. In the rope example, adapting the free-space dynamics requires significantly fewer data than adapting the free-space dynamics while also learning collision dynamics. We propose a new method for adaptation that is effective in adapting to regions of similar dynamics. Additionally, we combine this adaptation method with prior work on planning with unreliable dynamics to make a method for data-efficient online adaptation, called FOCUS. We first demonstrate that the proposed adaptation method achieves statistically significantly lower prediction error in regions of similar dynamics on simulated rope manipulation and plant watering tasks. We then show on a bimanual rope manipulation task that FOCUS achieves data-efficient online learning, in simulation and in the real world.
Data Augmentation for Manipulation
May 17, 2022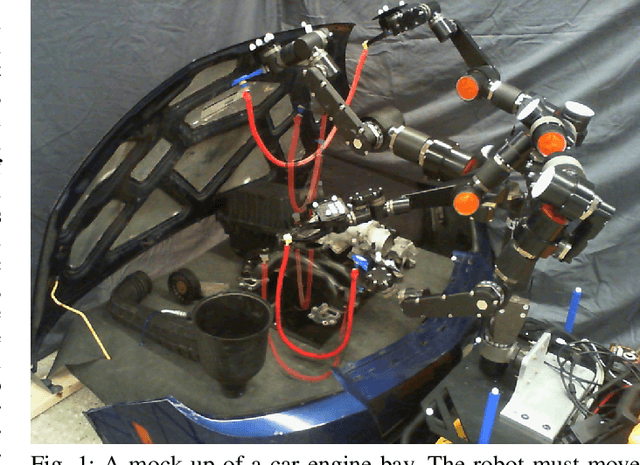
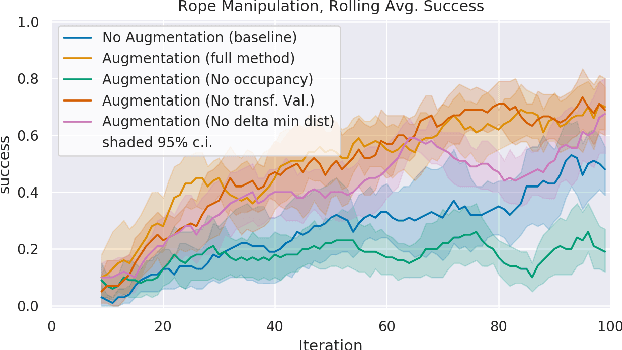
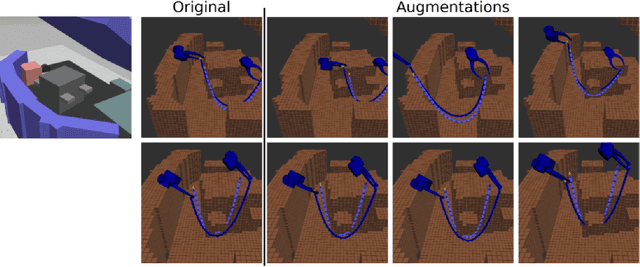
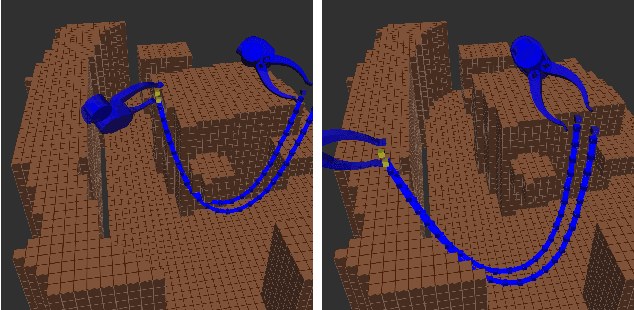
The success of deep learning depends heavily on the availability of large datasets, but in robotic manipulation there are many learning problems for which such datasets do not exist. Collecting these datasets is time-consuming and expensive, and therefore learning from small datasets is an important open problem. Within computer vision, a common approach to a lack of data is data augmentation. Data augmentation is the process of creating additional training examples by modifying existing ones. However, because the types of tasks and data differ, the methods used in computer vision cannot be easily adapted to manipulation. Therefore, we propose a data augmentation method for robotic manipulation. We argue that augmentations should be valid, relevant, and diverse. We use these principles to formalize augmentation as an optimization problem, with the objective function derived from physics and knowledge of the manipulation domain. This method applies rigid body transformations to trajectories of geometric state and action data. We test our method in two scenarios: 1) learning the dynamics of planar pushing of rigid cylinders, and 2) learning a constraint checker for rope manipulation. These two scenarios have different data and label types, yet in both scenarios, training on our augmented data significantly improves performance on downstream tasks. We also show how our augmentation method can be used on real-robot data to enable more data-efficient online learning.
Learning When to Trust a Dynamics Model for Planning in Reduced State Spaces
Jan 29, 2020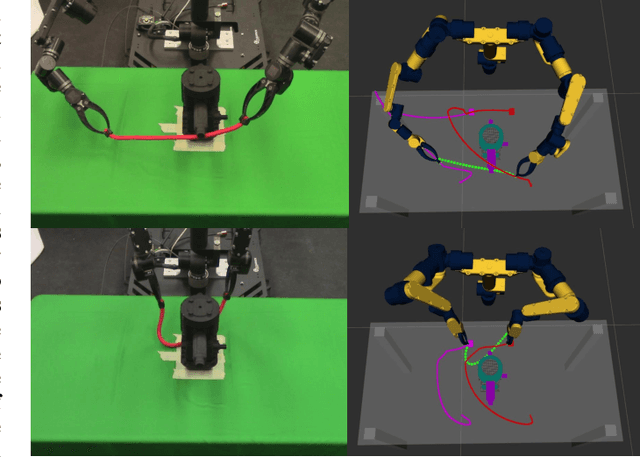
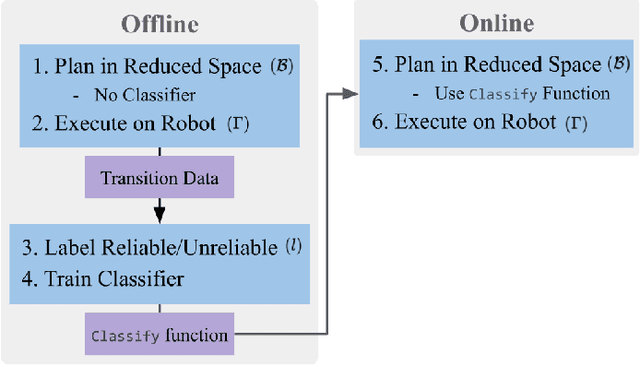
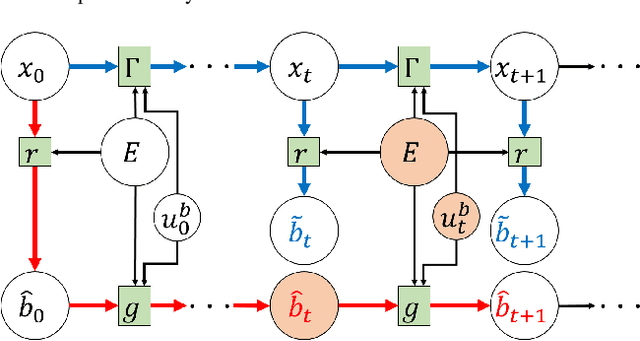
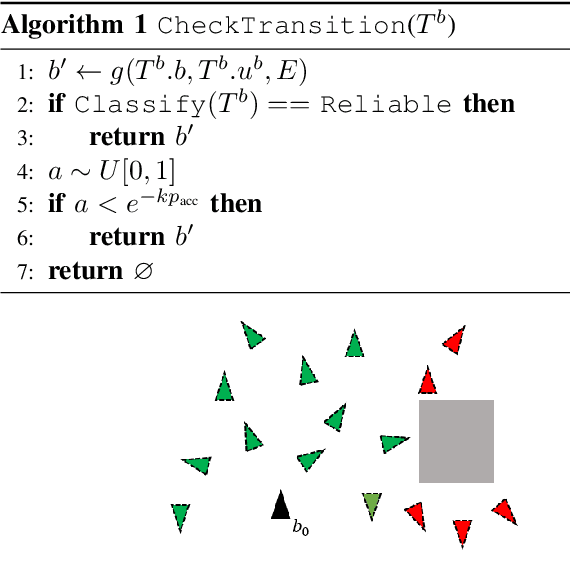
When the dynamics of a system are difficult to model and/or time-consuming to evaluate, such as in deformable object manipulation tasks, motion planning algorithms struggle to find feasible plans efficiently. Such problems are often reduced to state spaces where the dynamics are straightforward to model and evaluate. However, such reductions usually discard information about the system for the benefit of computational efficiency, leading to cases where the true and reduced dynamics disagree on the result of an action. This paper presents a formulation for planning in reduced state spaces that uses a classifier to bias the planner away from state-action pairs that are not reliably feasible under the true dynamics. We present a method to generate and label data to train such a classifier, as well as an application of our framework to rope manipulation, where we use a Virtual Elastic Band (VEB) approximation to the true dynamics. Our experiments with rope manipulation demonstrate that the classifier significantly improves the success rate of our RRT-based planner in several difficult scenarios which are designed to cause the VEB to produce incorrect predictions in key parts of the environment.
A Minimalistic Approach to Segregation in Robot Swarms
Jan 29, 2019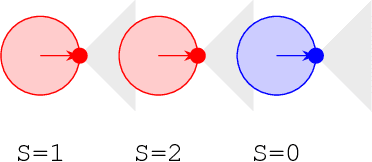
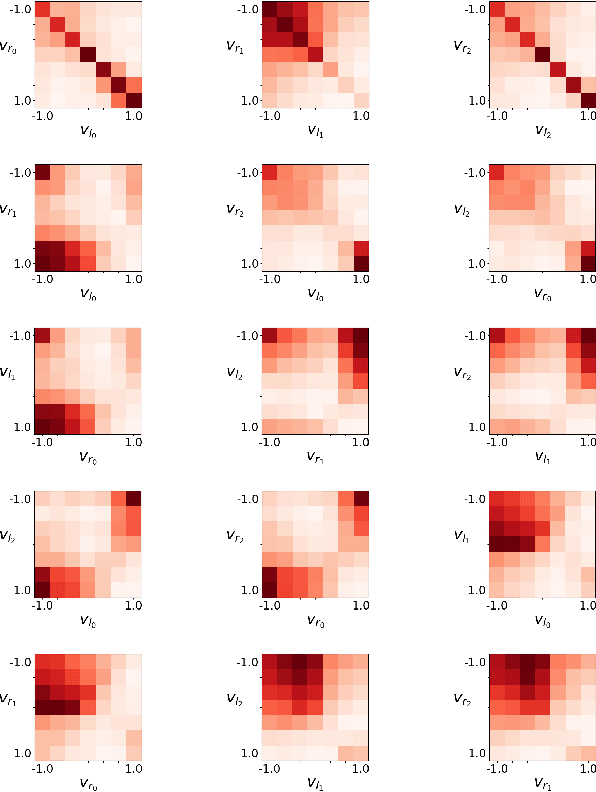
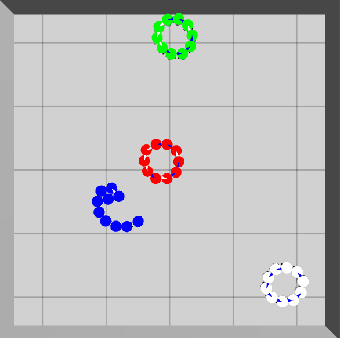
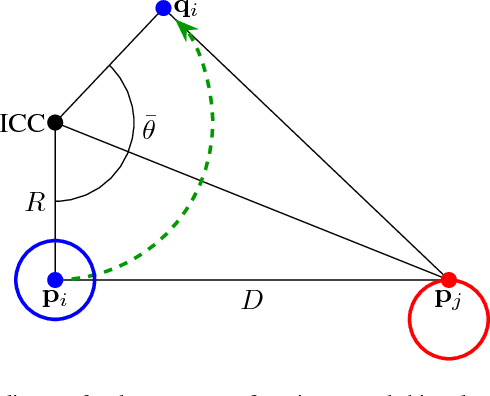
We present a decentralized algorithm to achieve segregation into an arbitrary number of groups with swarms of autonomous robots. The distinguishing feature of our approach is in the minimalistic assumptions on which it is based. Specifically, we assume that (i) Each robot is equipped with a ternary sensor capable of detecting the presence of a single nearby robot, and, if that robot is present, whether or not it belongs to the same group as the sensing robot; (ii) The robots move according to a differential drive model; and (iii) The structure of the control system is purely reactive, and it maps directly the sensor readings to the wheel speeds with a simple 'if' statement. We present a thorough analysis of the parameter space that enables this behavior to emerge, along with conditions for guaranteed convergence and a study of non-ideal aspects in the robot design.