 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePNC Enabled IIoT: A General Framework for Channel-Coded Asymmetric Physical-Layer Network Coding
Jul 08, 2021


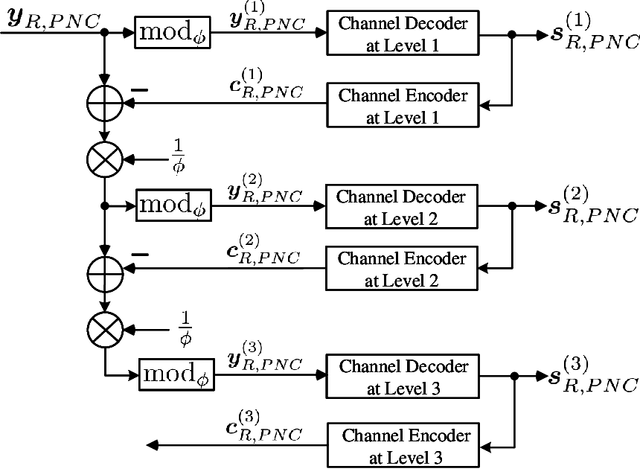
This paper investigates the application of physical-layer network coding (PNC) to Industrial Internet-of-Things (IIoT) where a controller and a robot are out of each other's transmission range, and they exchange messages with the assistance of a relay. We particularly focus on a scenario where the controller has more transmitted information, and the channel of the controller is stronger than that of the robot. To reduce the communication latency, we propose an asymmetric transmission scheme where the controller and robot transmit different amount of information in the uplink of PNC simultaneously. To achieve this, the controller chooses a higher order modulation. In addition, the both users apply channel codes to guarantee the reliability. A problem is a superimposed symbol at the relay contains different amount of source information from the two end users. It is thus hard for the relay to deduce meaningful network-coded messages by applying the current PNC decoding techniques which require the end users to transmit the same amount of information. To solve this problem, we propose a lattice-based scheme where the two users encode-and-modulate their information in lattices with different lattice construction levels. Our design is versatile on that the two end users can freely choose their modulation orders based on their channel power, and the design is applicable for arbitrary channel codes.