 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Spatial Reasoning by Mobile Robots for Reconstruction and Navigation in Dynamic LiDAR Scenes
May 18, 2025



Our brain has an inner global positioning system which enables us to sense and navigate 3D spaces in real time. Can mobile robots replicate such a biological feat in a dynamic environment? We introduce the first spatial reasoning framework for real-time surface reconstruction and navigation that is designed for outdoor LiDAR scanning data captured by ground mobile robots and capable of handling moving objects such as pedestrians. Our reconstruction-based approach is well aligned with the critical cellular functions performed by the border vector cells (BVCs) over all layers of the medial entorhinal cortex (MEC) for surface sensing and tracking. To address the challenges arising from blurred boundaries resulting from sparse single-frame LiDAR points and outdated data due to object movements, we integrate real-time single-frame mesh reconstruction, via visibility reasoning, with robot navigation assistance through on-the-fly 3D free space determination. This enables continuous and incremental updates of the scene and free space across multiple frames. Key to our method is the utilization of line-of-sight (LoS) vectors from LiDAR, which enable real-time surface normal estimation, as well as robust and instantaneous per-voxel free space updates. We showcase two practical applications: real-time 3D scene reconstruction and autonomous outdoor robot navigation in real-world conditions. Comprehensive experiments on both synthetic and real scenes highlight our method's superiority in speed and quality over existing real-time LiDAR processing approaches.
Hausdorff Point Convolution with Geometric Priors
Dec 24, 2020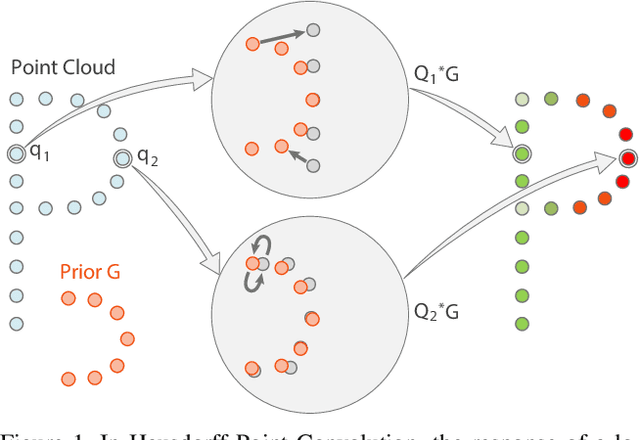
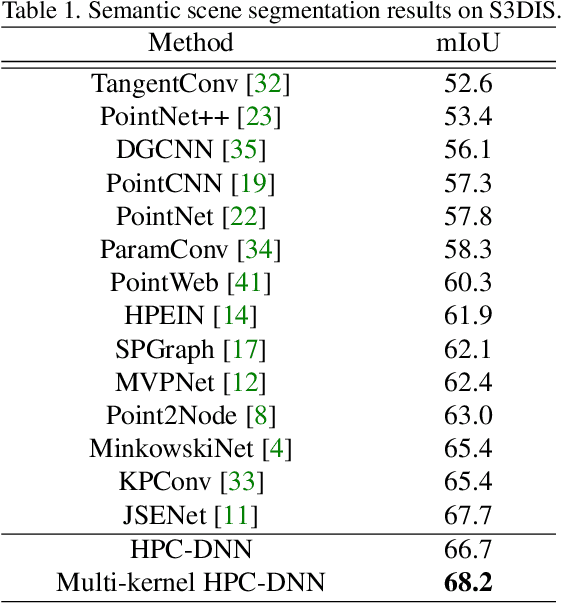
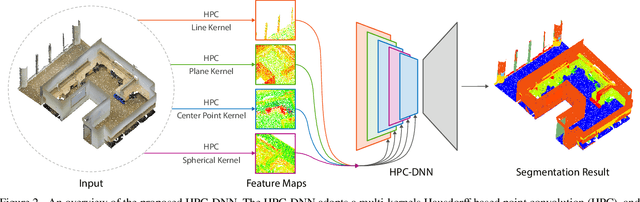
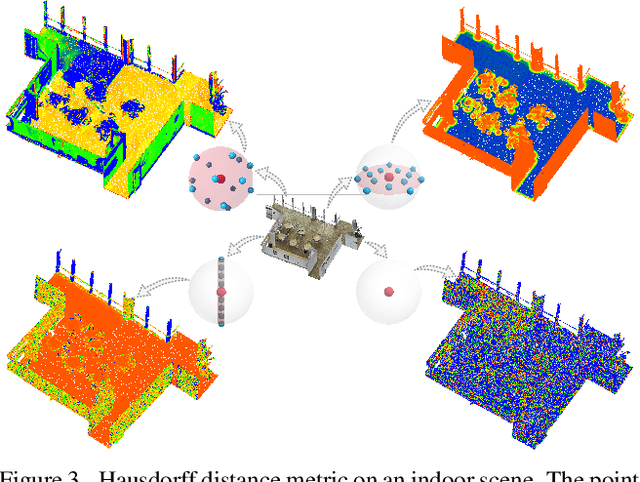
Without a shape-aware response, it is hard to characterize the 3D geometry of a point cloud efficiently with a compact set of kernels. In this paper, we advocate the use of Hausdorff distance as a shape-aware distance measure for calculating point convolutional responses. The technique we present, coined Hausdorff Point Convolution (HPC), is shape-aware. We show that HPC constitutes a powerful point feature learning with a rather compact set of only four types of geometric priors as kernels. We further develop a HPC-based deep neural network (HPC-DNN). Task-specific learning can be achieved by tuning the network weights for combining the shortest distances between input and kernel point sets. We also realize hierarchical feature learning by designing a multi-kernel HPC for multi-scale feature encoding. Extensive experiments demonstrate that HPC-DNN outperforms strong point convolution baselines (e.g., KPConv), achieving 2.8% mIoU performance boost on S3DIS and 1.5% on SemanticKITTI for semantic segmentation task.
Autonomous Outdoor Scanning via Online Topological and Geometric Path Optimization
Dec 23, 2020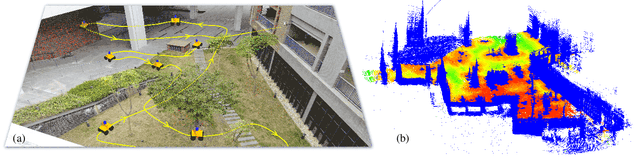
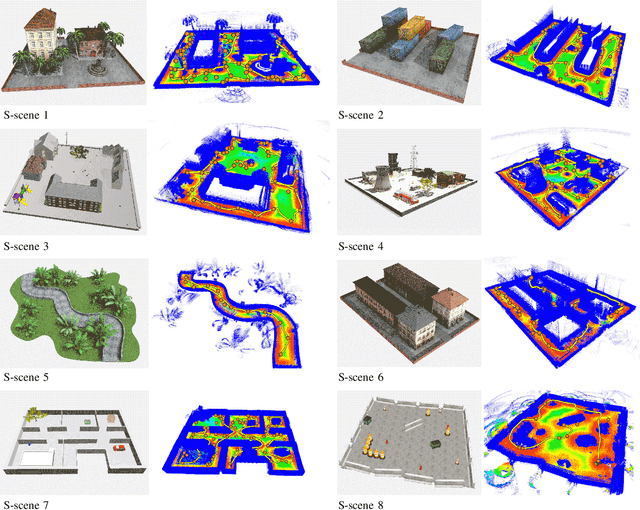
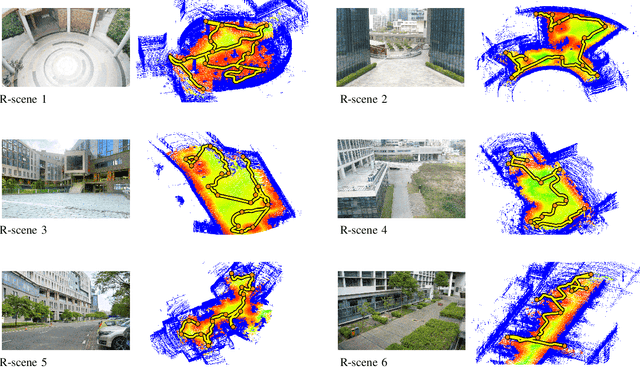
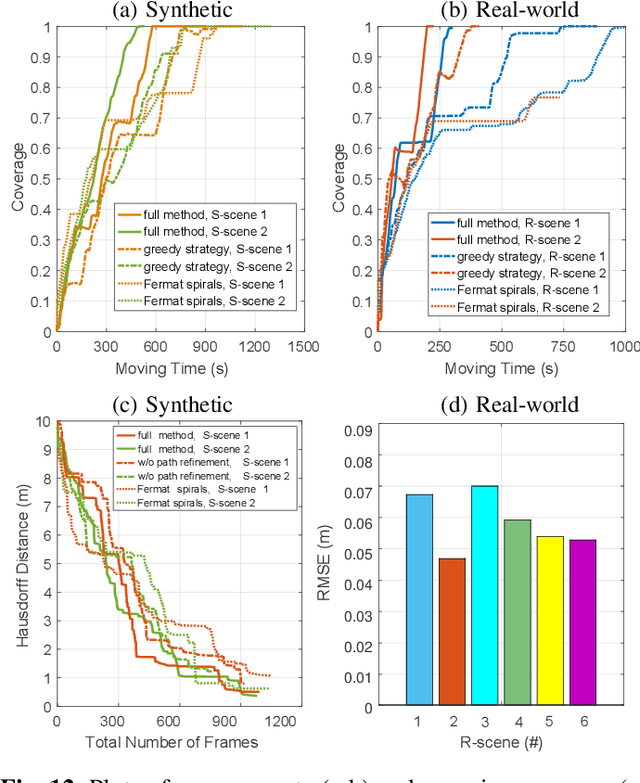
Autonomous 3D acquisition of outdoor environments poses special challenges. Different from indoor scenes, where the room space is delineated by clear boundaries and separations (e.g., walls and furniture), an outdoor environment is spacious and unbounded (thinking of a campus). Therefore, unlike for indoor scenes where the scanning effort is mainly devoted to the discovery of boundary surfaces, scanning an open and unbounded area requires actively delimiting the extent of scanning region and dynamically planning a traverse path within that region. Thus, for outdoor scenes, we formulate the planning of an energy-efficient autonomous scanning through a discrete-continuous optimization of robot scanning paths. The discrete optimization computes a topological map, through solving an online traveling sales problem (Online TSP), which determines the scanning goals and paths on-the-fly. The dynamic goals are determined as a collection of visit sites with high reward of visibility-to-unknown. A visit graph is constructed via connecting the visit sites with edges weighted by traversing cost. This topological map evolves as the robot scans via deleting outdated sites that are either visited or become rewardless and inserting newly discovered ones. The continuous part optimizes the traverse paths geometrically between two neighboring visit sites via maximizing the information gain of scanning along the paths. The discrete and continuous processes alternate until the traverse cost of the current graph exceeds the remaining energy capacity of the robot. Our approach is evaluated with both synthetic and field tests, demonstrating its effectiveness and advantages over alternatives. The project is at http://vcc.szu.edu.cn/research/2020/Husky, and the codes are available at https://github.com/alualu628628/Autonomous-Outdoor-Scanning-via-Online-Topological-and-Geometric-Path-Optimization.
* Accepted by IEEE Transactions on Intelligent Transportation Systems
One Point is All You Need: Directional Attention Point for Feature Learning
Dec 14, 2020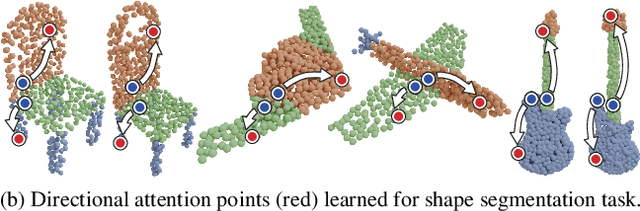
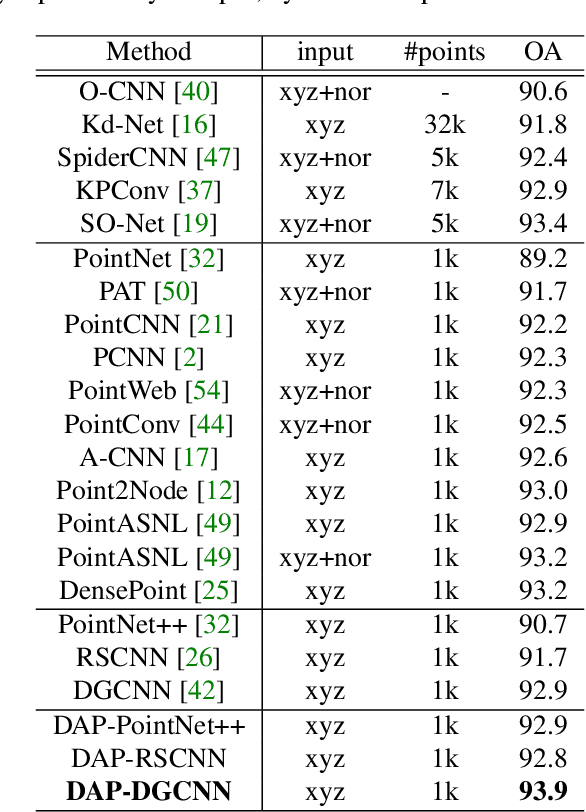
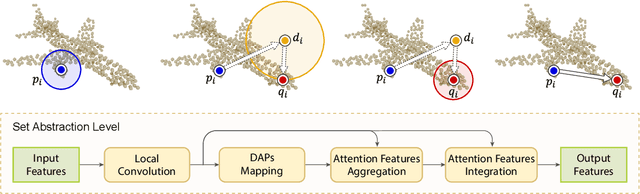
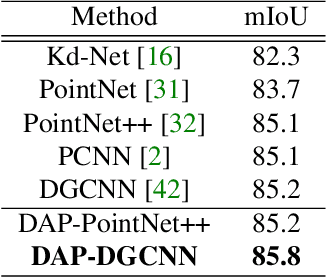
We present a novel attention-based mechanism for learning enhanced point features for tasks such as point cloud classification and segmentation. Our key message is that if the right attention point is selected, then "one point is all you need" -- not a sequence as in a recurrent model and not a pre-selected set as in all prior works. Also, where the attention point is should be learned, from data and specific to the task at hand. Our mechanism is characterized by a new and simple convolution, which combines the feature at an input point with the feature at its associated attention point. We call such a point a directional attention point (DAP), since it is found by adding to the original point an offset vector that is learned by maximizing the task performance in training. We show that our attention mechanism can be easily incorporated into state-of-the-art point cloud classification and segmentation networks. Extensive experiments on common benchmarks such as ModelNet40, ShapeNetPart, and S3DIS demonstrate that our DAP-enabled networks consistently outperform the respective original networks, as well as all other competitive alternatives, including those employing pre-selected sets of attention points.